 投标-安然纳米-技术标案例
投标-安然纳米-技术标案例
山东安然纳米实业发展有限公司
智能仓储物流配送中心
技术标

| 投 标 人: | 北京机械工业自动化研究所 |
| 地 址: | 北京市西城区德胜门外教场口1号(100120) |
| 电话/传真: | 010-82285824/82285161 |
| 日 期: | 2016年1月5日 |
# 前言
感谢贵方邀请北京机械工业自动化研究所(RIAMB)(以下简称“北自所”)参加山东安然纳米实业发展有限公司智能仓储物流配送中心项目的投标。我方已经阅读了相关的招标要求,并在相互沟通与投标答疑上得到了问题的澄清。在此,我方十分荣幸地提交对贵方招标文件的正式回应投标文件。
本项目对投标商在方案、设备质量、软件架构、项目实施经验和质量等方面提出了很高的要求。北京机械工业自动化研究所对贵方的项目予以高度重视。北京机械工业自动化研究所作为世界一流的物流集成系统供应商,在国内物流系统领域处于领军地位。北京机械工业自动化研究所大量自动化立体库物流系统成功的案例显示,我方完全可以向客户提供复杂的自动化立体库、堆垛机等物流系统。信守交货承诺一向是我方的原则。
北京机械工业自动化研究所(RIAMB)是国家和原机械部开发及应用自动化仓储技术的主要单位,是国家科技部指定的全国推广应用物流仓储技术的依托单位。本所是国家大型高科技企业,以发展计算机集成制造技术为目标,致力于工业自动化技术的开发与应用。世行贷款的制造业自动化国家工程研究中心NERC-MA、联合国援建的CAD/CAM技术中心、国家CIMS技术网点等代表当今世界先进水平的技术机构设在本所。
北京机械工业自动化研究所是全国领先的自动化物流系统集成商和制造商,提供物流解决方案满足客户物流供应链长期持续发展的需求。拥有50年物流处理系统专业经验的北京机械工业自动化研究所是自动化立体库库国家行业标准及规范的制订者,是物流系统核心设备的生产供货商,北自所一直在行业内扮演着举足轻重的角色。
北自所在全国成功实施过几百个案例,无用户不良反映和重大的质量安全事故。北自所几十年来一直遵循严谨的企业风格,信誉是我们最珍视的资产。北自所在全国有着丰富的此类项目经验,北自所将把全国同行业的先进经验和知识传递给贵司。
北自所不仅有着具有丰富项目实施经验的团队,同时依靠标准化的项目实施流程来确保项目实施过程中的每个环节都达到事先的要求,保证项目的最终成功。北自所有完善的售后服务体系和快速的服务响应,来保证所提供的系统在长时期内的有效运行。北自所稳健的财务状况,安全的保证了客户的最大利益。
山东安然纳米实业发展有限公司智能仓储物流配送中心项目是北自所密切关注的项目,我们热切盼望与贵司携手,确保安然纳米取得本项目的圆满成功,为安然纳米的业务高速增长提供坚实的基础。
# 第一章 概述
# 第一节 系统概述
# 1.1投标范围
此次招标项目工程为一站式交钥匙工程。我方负责供货范围内的产品进行设计、制造、采购、供货、工厂检验及试验、涂漆、标记、包装及运输及现场安装等工作,同时提供系统正常运行2年的备品备件,售后培训等服务。
供货范围主要包括但不限于下表所列项目:
| 序号 | 货物名称 | 主要规格、型号 | 数量 | 单位 | 备注 |
|---|---|---|---|---|---|
| 1 | 立体仓库货架 | 组合式货架 | 1 | 套 | |
| 2 | 堆垛机系统 | 有轨巷道堆垛机 | 1 | 套 | |
| 3 | 平库拣选货架系统 | 流利式拣选货架、搁板式拣选货架、整托盘拣选架、斜插式周转箱 | 1 | 批 | |
| 4 | 北面1楼托盘输送机系统 | 托盘输送系统、外形检测站、其它附件 | 1 | 批 | |
| 5 | 北面2楼生产入库输送系统 | 托盘输送系统、外形检测站、其它附件 | 1 | 批 | |
| 6 | 箱式输送机系统 | 1 | 批 | ||
| 7 | 拣选复核打包输送系统(输送拣选周转箱) | 箱式辊筒输送系统、装箱台、空气袋充气机 | 1 | 批 | |
| 8 | 空箱回流输送系统(输送空周转箱) | 箱式辊筒输送系统 | 1 | 批 | |
| 9 | 包装发货输送系统 | 箱式辊筒输送系统、箱式皮带输送系统、分拣系统 | 1 | 批 | |
| 10 | 计算机软件及硬件 | 1 | 批 |
# 1.2系统特点
作为国内首屈一指的物流自动化系统总承包商和系统集成商,基于近300座物流自动化系统建设的经验,本方案技术水平定位为国内领先水平,具有多方面的特点:
# 1.2.1先进性和实用性
在本方案所用的集成技术,均是在多个工程实例中使用过成熟的先进技术。既具有很高的先进性,又有很强的实用性。避免了项目实施过程的盲目性和不必要的损失。系统方面,经过严格测试的集成化物流管理系统WMS及WCS在华润医药、江中制药、中部医药、扬子江药业、哈尔滨誉衡药业、正大丰海制药、上海新先锋药业、河南圣光药业、福州药材库、广州药材库、天津氨基酸、蒙牛乳业、伊利乳业、三元乳业、中粮集团、双汇集团、三全集团、总后勤直属海军、巨石集团等众多知名企业的物流系统中得到应用取得良好效果。尤其是与ERP系统的集成技术方面,更体现了我们领先一步的先进技术和经验。
# 1.2.2高性能价格比和经济性
本着对用户的高度负责的精神,在本工程所用的集成技术和软件,均具有良好的性能价格比。无论是技术还是产品,均体现这一原则。在满足作业需求的前提下,以实现系统综合效率最高为目标,优先选择同类型产品中最合适的产品。避免为片面追求单机产品的高速度,造成不必要的浪费。
# 1.2.3系统可拓展性
本方案中所用的集成化物流系统,采用当前先进的客户机/服务器结构,服务器采用国际一流水准的IBM服务器构成双机热备份系统,所有硬件采用国际名牌产品。软件系统功能强大,可支持企业ERP系统连接。系统具有良好的可扩展性。
# 1.2.4高可靠性和安全性
在本方案设计时可靠性放在方案和物流设备设计的首位。物流系统关键设备如堆垛机、输送机的所有关键元器件,如电机减速机、可编程序控制器、无线通信设备、现场总线、激光测距仪、旋转编码器、变频器、齿形带等均采用世界一流产品。设备强度和刚度、稳定性均达到国家安全规范规定要求。
# 1.2.5高冗余性耦合性
在本方案设计时充分考虑系统的自恢复能力和冗余设计,确保系统强大的抗干扰能力。系统设计有高冗余性功能。即上位机管理监控系统瘫痪,输送设备以及堆垛机正常的情况下,系统能自动进行一定的作业,进行入库出库以保证生产入库以及出库发挥的基本要求。当网络环境或监控计算机出现故障时,堆垛机控制系统仍然可以通过自动方式,独立地进行出/入库作业。堆垛机设计有自己的货架表,能够自动识别货架的基本情况从而在上位机不能正常工作的时候系统照常进行工作。
# 1.2.6高准确性
在本方案设计时充分考虑到整个自动化立体仓库物流系统运行过程中托盘的追踪以及货物帐务的准确度。物流系统关键设备堆垛机上设计安装有条码阅读器。利用条码识别器实现了堆垛机对托盘自动进行货位地址分配、出库校验、自动盘点的功能,相当于给堆垛机安装了一双眼睛,充分提高系统的准确性,确保系统管理系统帐务100%准确无误。
# 1.3总体布置图
参见附图:“山东安然纳米实业发展有限公司智能仓储物流配送中心项目方案图”。
# 第二节 设计依据
本方案依据山东安然纳米实业发展有限公司智能仓储物流配送中心项目《招标文件》
# 第三节 设计原则
根据用户的技术要求,结合我所多年来实施生产物流管理系统的经验,在进行系统设计时遵循以下原则:
安全性原则:必须保证设备和系统运行安全。
可靠性原则:保证设备和系统运行的可靠性。
适用性原则:系统适合用户需求,操作流程清晰,充分考虑操作可行性和方便性,使操作简便,不容易出错。
经济性原则:在满足用户要求及以上原则前提下,采用最经济的投资及运行解决方案。
易维护性原则:设备和系统设计充分考虑系统运营后的维护的便利性,使维护成本最低。
系统设计本着一切从甲方利益出发的原则,在总体规划时,既要满足当前的实用性,还要考虑企业将来的可持续发展的需要,具有一定的前瞻性,同时留有将来的发展空间。为此,制订以下系统设计原则:
灵活的开放式系统结构,使系统具有可扩展性和兼容性原则
吸收国内外的先进成熟技术,选用设备先进性原则
物流自动化程度最高原则
物流流程及配置最简捷原则
系统高稳定可靠性原则
操作简便,易于维护保养原则
性价比最高原则,针对行业特性最适用原则
# 第四节 设计规范
本项目设备与系统的设计、制造、安装调试及验收遵循以下标准及规范:
# 4.1物流系统工程设计
FEM9.831 自动化仓库设备设计规范
JB/T 9018-2011 自动化立体仓库设计规范
GB50057-94 建筑物防雷设计规范(2000版)
GB 50016-2006 建筑设计防火规范
GB50116-98 火灾自动报警系统设计规范(2008版)
GB50084-2001 自动喷水灭火系统设计规范(2005版)
GB50140-2005 建筑灭火器配置设计规范
GBJ 87-85 工业企业噪声控制设计规范
GBJ65-83 工业与民用电力装置的接地设计规范
GB50176-93 民用建筑热工设计规范
# 4.2机械设计部分
JB 2960-81 巷道堆垛机型式与基本参数
JB/T 5319.1-2008 巷道堆垛起重机术语
JB/T 7016-93 有轨巷道堆垛起重机技术条件
JB/T 11269-2011 巷道起重机安全规范
JB/T11270-2011 立体仓库组合式钢结构货架技术条件
GB50009-2001 建筑结构荷载规范(2006版)
GB50018-2002 冷弯薄壁钢结构技术规范
GB50017-2003 钢结构设计规范
GB50011-2001 建筑抗震设计规范
GB50205-2001 钢结构工程施工质量验收规范
GB12265.3-1997 机械安全 避免人体各部位挤压的最小间距
GB 2894-2008 安全标志及其使用导则
GB/T 13306-1991 标牌
# 4.3电气控制系统设计部分
JGJ/T 16—1992 民用建筑电气设计规范(2008版)
GB/T6988.1~4-1997 电气技术用文件的编制(2008版)
GB/T4728.1-1985 电气图用图形符号(2008版)
GB/T4728.2~13-1998 电气简图用图形符号(2008版)
GB/T 4064-1983 电气设备安全设计导则
GBJ79-85 工业企业通信接地设计规范
GBJ65-83 工业与民用电力装置的接地设计规范
GBJ57—94 建筑防雷设计规范
GB 50093-2002 自动化仪表工程施工及验收规范
GBJ63-90 电气装置的电测量仪表装置设计规范
GB 4064-83 电气设备安全设计导则
GB 50055—93 通用用电设备配电设计规范
GB 50054-95 低压配电设计规范
GB 2682 电工成套装置中的指示灯和按钮的颜色
GB 4208 外壳防护等级的分类(2008版)
GB 4884-1985 绝缘导线的标记
DL/T621-97 交流电气装置的接地
CECS 31:91 钢制电缆桥架工程设计规范
# 4.4软件系统设计部分
GB/T 11457-2006 软件工程术语
GTB856 软件工程国家标准
ISO/IEC11801-95 信息技术互连国际标准(2002版)
GB 8566-88 计算机软件开发规范(95版)
GB 8567-99 计算机软件产品开发文件编制指南
GB/T l 2504-90(ANSI/IEEE730 计算机软件质量保证计划规范
GB/T12505-90(IEEE 828) 计算机软件配置管理计划规范
GB/T16260-96(ISO/IEC 9126-91) 信息技术 软件产品评价质量特性及其使用指南
GB/T l 5532-95 计算机软件单元测试(2008版)
GB/T 14079-93 软件维护指南
GB9385—88(ANSI/IE~E 829) 计算机软件需求说明编制指南
GB 9386-88(ANSI/IEEE 830) 计算机软件测试文件编制规范
GBJ79-85 工业企业通信接地设计规范
GB/T 8566-l995 信息技术 软件生存期过程
GB/T 14394-1993 计算机软件可靠性和可维护性管理
GB/T 15532-2008 计算机软件单元测试
# 4.5网络系统集成及综合布线设计部分
ISO 7498 OSI 七层参考模型
IEEE 802.3 快速以太网标准规范
IEEE 802.3 千兆位以太网标准规范
IEEE 802.5 令牌环标准规范
IEEE 802.10 虚拟网络标准规范
IEEE 802.12 100Base-VG标准
ANSI X3T9.5 光纤分布式数据接口标准规范
# 4.6施工、安装、验收部分
GB50231-98 机械设备安装工程施工及验收通用规范
GB50278-98 起重设备安装工程施工及验收规范
GB50261-2005 自动喷水灭火系统施工及验收规范
GB50258-96 电气装置安装工程1KV及以下配线工程施工及验收规范
GB50256-96 电气装置安装工程 起重机电气装置施工及验收规范
GB50257-96 电气装置安装工程 爆炸和火灾危险环境电气装置施工及验收规范
GB50254-96 电气装置安装工程 低压电器施工及验收规范
GB50171-92 电气装置安装工程 盘、柜及二次回路结线施工及验收规范
GB50150-2006 电气装置安装工程 电气设备交接试验标准
GB50303-2002 建筑电气工程施工质量验收规范
# 第二章 总体规划
# 第一节 总体概述
经过北京机械工业自动化研究所(北自所)工程师和安然纳米相关技术人员对本项目的技术交流与沟通,本单位对双方相互交流的信息与数据进行合理分析研究,确定本次投标技术方案中设备组成如下:
| 设备名称 | 设备单元 | 设备简述 |
|---|---|---|
| 组合横梁式货架系统 | 货物单元 | 托盘尺寸:1200mm(长)×1000mm(宽)×170mm(高) 货物单元尺寸(含托盘): 1200mm(长)×1000mm(宽)×1500mm(高) 货物单元重量:最大500kg(含托盘) |
| 货位数 | 4巷道×2排×37×2列×11层+48悬臂=6560托盘 | |
| 货格 | 2400×1100×1725(双货位) | |
| 货架 | 货架预留消防空间;与地面采用化学螺栓连接方式; 表面静电喷涂;横梁弯曲度≤L/250; 满足威海地震设防烈度7度,设计地震加速度值0.10g; | |
| 堆垛机系统 | 双立柱 单伸度 巷道堆垛机 | 堆垛机H=20100mm,提升能力500kg;数量:4台; |
| 水平运行速度:0~160m/min(变频调速), 垂直升降速度:0~40m/min(变频调速), 载货台货叉速度:0~40m/min(变频调速), 水平加速度:0.45m/s²,垂直加速度:0.5m/s²; 水平定位精度:±5mm;货叉/垂直定位精度:±3mm; | ||
| 水平机构、升降机构、货叉机构采用SEW电机减速机; DEMAG行走车轮组;MIAS货叉;关键部位SKF轴承; 钢丝绳卷扬提升,具备断绳保护功能,且为纯机械装置。 具备多项完善的安全保护措施; | ||
| 自动控制系统 | 联机自动操作为主,也能手动、半自动、单机自动; 水平定位:采用激光测距绝对认址方式; 垂直定位:采用激光测距绝对认址方式; 货叉定位:采用编码器认址方式; 自动控制系统SIEMENS S7-300系列PLC; 采用SIEMENS数字操作终端,无线以太网通讯 | |
| 巷道设备 | 天轨、地轨 | 天轨:10010010角钢,地轨:38Kg/m轨, L=94m/套,数量:4套;地轨采用化学螺栓固定; |
| 安全滑触线 | 法勒滑触线,L=94m/套,数量:4套; | |
| 入出库托盘输送系统 | 穿梭车 | 行走高速段速度:120m/min,加速度:0.5m/s²; 定位精度:±5mm,SEW电机驱动; 额定承重:500kg,无线以太网通讯; 采用条码带定位,铝合金轨道,法勒滑触线 |
| 托盘输送机 | 主要由链式输送机、辊式输送机、辊式移载机、提升机、拆盘机、尺寸检测架、LED屏等组成; 额定承重:500kg,无线以太网通讯; 输送机输送速度:16m/min(变频调速),SEW电机驱动; 链条双排链式,辊筒碳钢镀锌 提升机提升速度:35m/min(变频调速),SEW电机驱动; | |
| 输送机 控制系统 | 自动控制系统SIEMENS S7-300系列PLC, 电气元器件采用国际知名品牌;采用SIEMENS数字操作终端; 支持手动、维修手动、单机自动和联机自动四种控制方式; 必要位置设置急停开关;具备多项完善的安全保护措施; | |
| 箱式输送系统 | 箱式输送机 | 主要由箱式辊筒输送机、箱式皮带输送机等组成; 输送线体上安装有护栏,起点有积放段,终点段有整形段,主线和分拣线有自动休眠功能,必要位置设置急停开关; 输送速度:36m/min(变频调速),SEW电机驱动; 额定载荷:50kg/m; |
| 输送机 控制系统 | 自动控制系统SIEMENS S7-300系列PLC,电气元器件采用国际知名品牌;采用SIEMENS数字操作终端; 支持手动、维修手动、单机自动和联机自动四种控制方式; 必要位置设置急停开关;具备多项完善的安全保护措施; | |
| AGV系统 | 由AGV小车、管理主机、监控主机、智能充电设备等组成; 导引方式:磁导引;无线通讯方式;双轮兰差动方式; 运行速度:直线运行速度0-60m/min可调; 转弯速度:18m/min;停位精度:±5mm; 安全防护:激光障碍物传感器+机械防撞机构双重防护; | |
| 计算机管理监控系统 | 1套 | 本所自主开发、技术成熟的高性能管理(WMS)及监控系统(WCS),可与上级ERP信息系统连接 |
| 辅助系统 | 1套 | 桥架、无线手持终端等 |
| 平库拣选货架系统 | 流利式 拣选货架 | 共计:210个品规,单个品规存储量:5箱 单组货架外形尺寸:L4920mm×W3050mm×H2000mm 单组货架流利条滑道数量:4层×7列 (下面三层电子标签拣选用,顶层空箱回收) 单组货架拣选品规:21个,共10组货架 最大纸箱尺寸:400×600×440 |
| 搁板式 拣选货架 | 共计:784个品规,单个品规存储量:1箱 单组货架外形尺寸:L3055mm×W600mm×H2000mm 层数:4层 单组拣选品规:14个×4层,共14组 最大纸箱尺寸:400×600×440 | |
| 整托盘拣选架 | 共计:20个品规,单个品规存储量:2托 地面摆放,采用铝形材框架 共20组,每组2托盘 | |
| 斜插式周转箱 | 数量:350个 规格:W400mm×L600mm×H275~315mm 载重:25kg/箱,材质:PP(聚丙烯) |
以上设备的设计、制造、运输、安装调试、培训及相关服务内容,物流系统总体规划设计与其他系统的土建配合
本方案采用一套集成化计算机管理和监控系统。该系统接受用户所有任务,并通过管理和调度所有物流设备有条不紊地运行,使该物流自动化系统满足用户业务的需要。该系统支持与用户上级管理系统信息集成,利于管理、宏观调控与决策。
# 第二节 总体规划描述
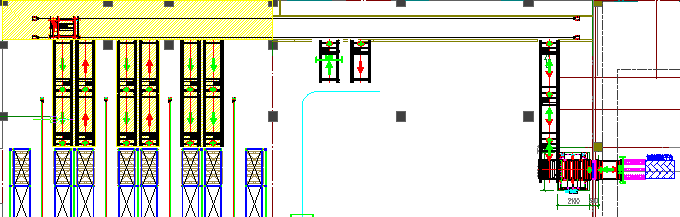
# 2.1规划布局
# 2.1.1 整体布局
立库位置:7#楼与8#楼西侧至挡土墙区域,详见平面布置图,楼面承重500kg/平方米;
总区域分为立库及平库两部分,平库二层北侧设一平台,可整托出入库;
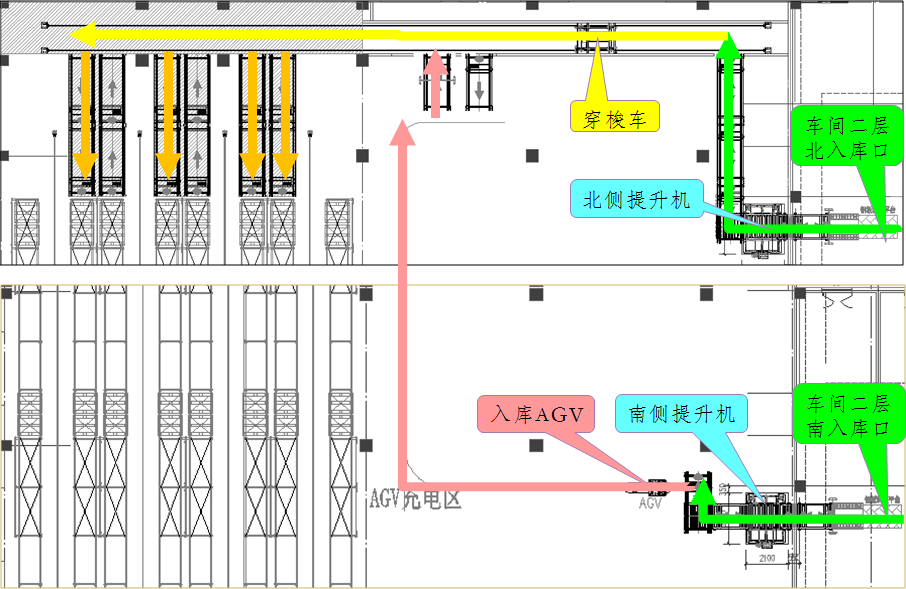
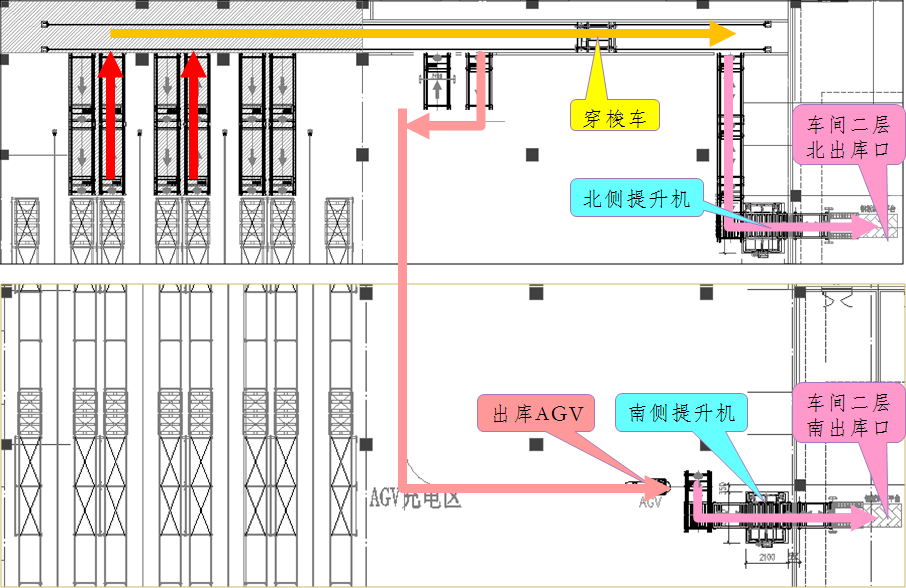
平库与7#、8#楼相连接并且1-4层全部打通,连接处各安装一台提升机用来入库产品及空托盘的出库;
北楼各车间通过提升机运输产品至二层,直接入库;
南楼各车间通过提升机运输产品至二层,通过一台背驮式AGV小车,运到北侧入库口入库;
8#楼(北侧)一层用于分拣、复核、打包、称重、配送;
快递车辆在8#楼北侧装卸,需设计6个停车位;
原材料产品运输车辆在7#楼与8#楼中间装卸;
立库东侧中间部位设3T电梯一部,用于原材料产品输送;
在一层北侧设立参观走廊;
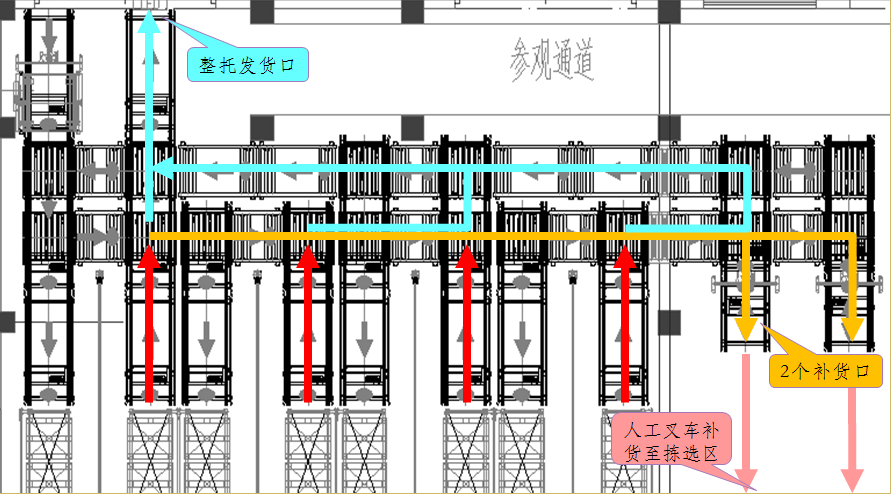
立库一层北侧西门用于委外成品入库及整托发货。
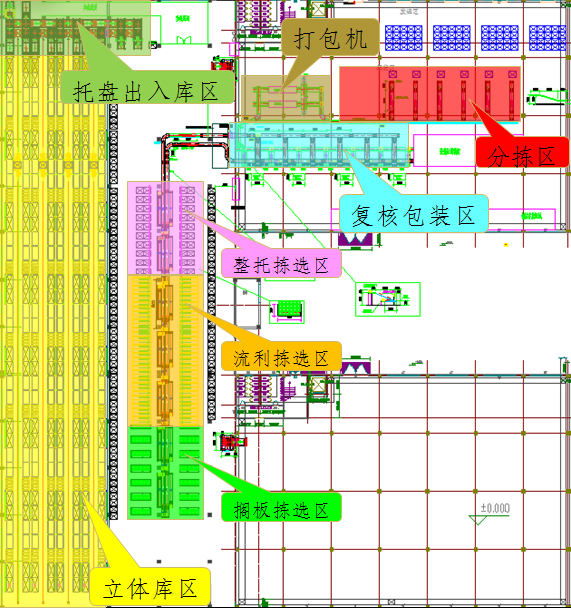
图1. 一层平面布局图
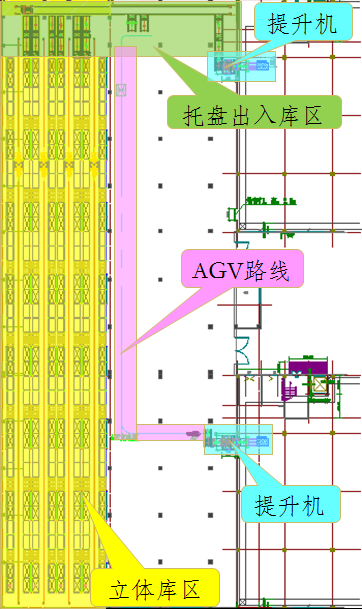
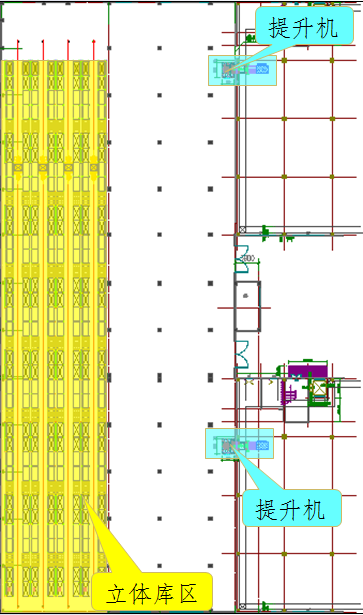
图2. 二层平面布局图 图3. 三四层平面布局图
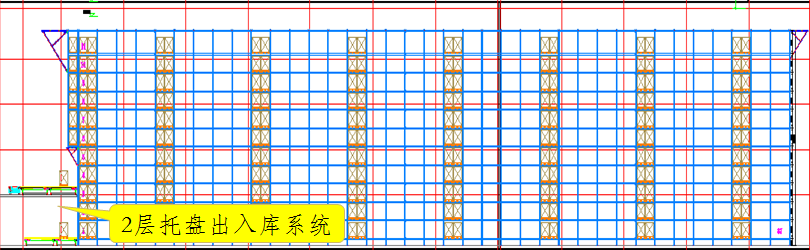
图4. 立体库立面布局图
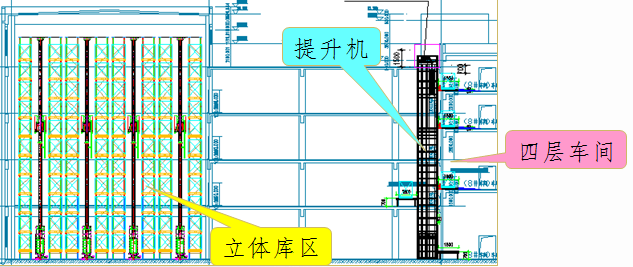
图5. 立体库立面布局图
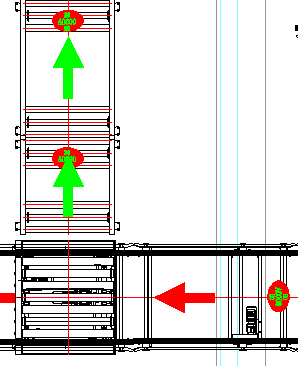
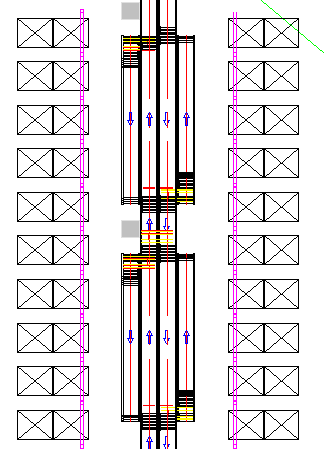
# 2.1.2 输送系统布局
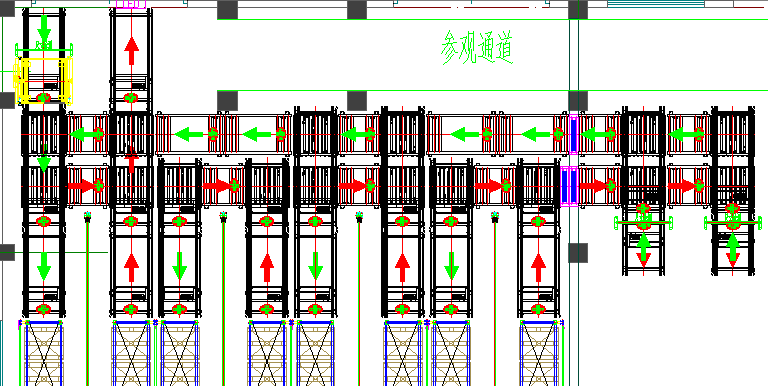
图1. 一层托盘输送系统
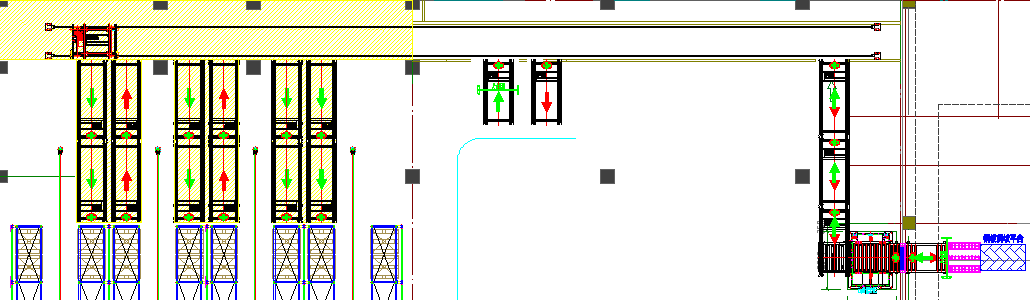
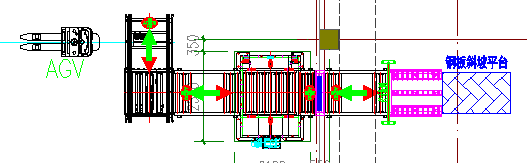
图2. 二层托盘输送系统
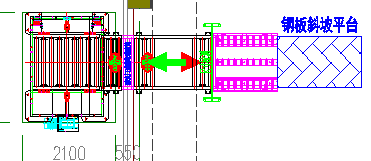
图3. 三层北侧/南侧托盘输送系统
图4. 四层北侧/南侧托盘输送系统
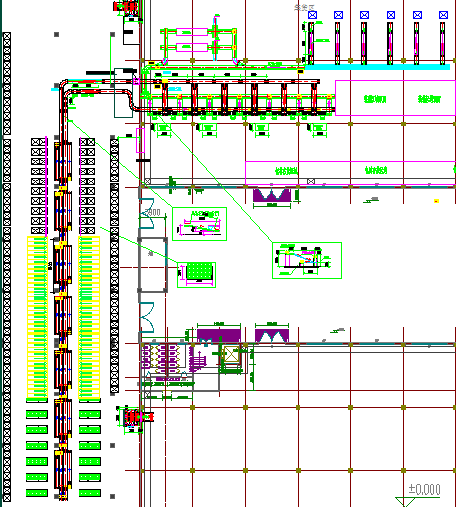
图4. 一层箱式输送系统
# 2.2存储单元规划
# 2.2.1 托盘货物
托盘尺寸:W1000mmL1200mmH170mm(空托盘),托盘载重:500kg
载货尺寸:W1000mmL1200mmH1500mm(含托盘)
单元载重:500kg/PL(含托盘)
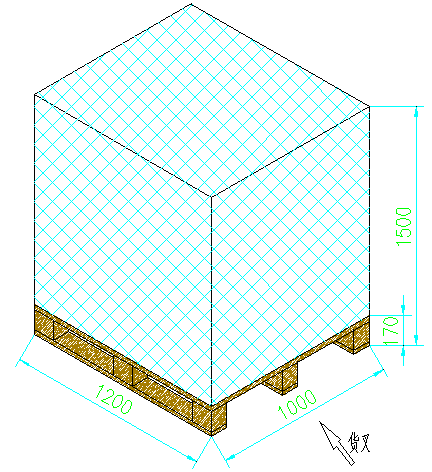
货物单元示意图
# 2.2.2 箱式货物
拣选料箱尺寸:W400mmL600mmH280~315mm,直插式,料箱载重:25kg
复核打包纸箱尺寸:
| 名称 | 规格尺寸 | 是否自动打包 | 备注 |
|---|---|---|---|
| 1## | 604044 | 实现自动打包 | |
| 2## | 604425 | ||
| 3## | 473943 | 水机专用 | |
| 4## | 443420 | ||
| 5## | 604418 | ||
| 6## | 543615 | ||
| 小A | 172922 | 人工粘封 | |
| 小D | 212029 | ||
| 小E | 38.53513 |
# 第三节 系统流程
3.1条码说明
每个托盘上粘贴条码,条码内容为托盘号号,托盘号号具有唯一性;
每台巷道堆垛机上安装一台条码读写器。
托盘粘贴条码,堆垛机上安装条码阅读器的方式在立体仓库自动控制和库存管理中占有重要的地位,主要具有以下优点:
可确保入库托盘和货位地址的对应关系在库存账目中100%准确。针对本系统的特点,大部分托盘的组盘和组盘信息的录入在生产车间完成,小部分托盘在仓库内部完成。计算机管理系统对托盘入库巷道进行优化分配后,托盘被放到指定巷道的入库口输送机上,然后进入相应巷道后,由于堆垛机上安装条码阅读器的方式,可以实现托盘入库由堆垛机控制系统来自动分配货位地址,由于堆垛机控制系统中记忆单元的高度可靠性,从而确保了入库托盘托盘号和入库货位地址的对应关系在库存帐目中100%准确。
可提高立体仓库可靠性。当监控计算机出现故障或堆垛机与监控计算机通讯故障时,堆垛机仍能以自动方式进行入库作业。待通讯恢复后堆垛机再向监控系统报告,修正帐目,确保库存数据的准确性。
可确保出库托盘的准确性为100%准确。采用托盘粘贴条码,堆垛机上安装条码阅读器的方式,可以实现对出库托盘托盘号的自动校验,通过对托盘上的条码和出库指令中条码的比较,可以自动判别该托盘是否是所需要的托盘。对于两者不相符的情况,可以自动将该托盘送回原处,并将该货位定义为问题货位,并提示中控室内管理人员进行人工处理。
可实现自动盘库。由于有条码,堆垛机可以在空闲时做自动盘库作业,而无需操作人员人工盘库,降低了工作人员的劳动强度,提高了效率。
3.2系统信息流程说明
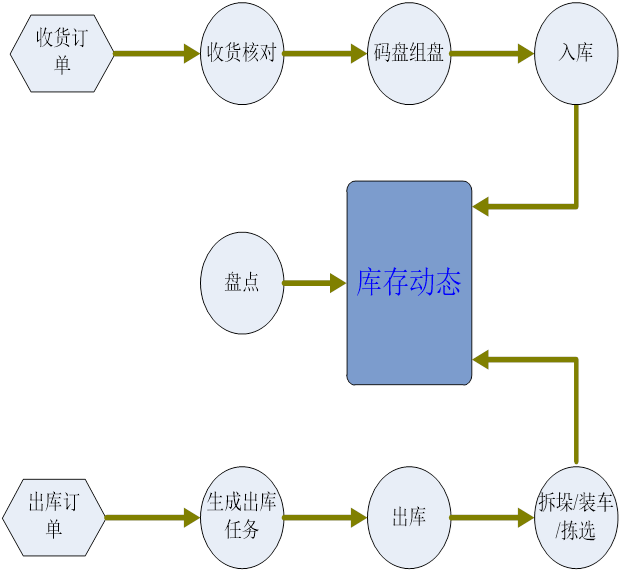
# 3.2.1 总流程图
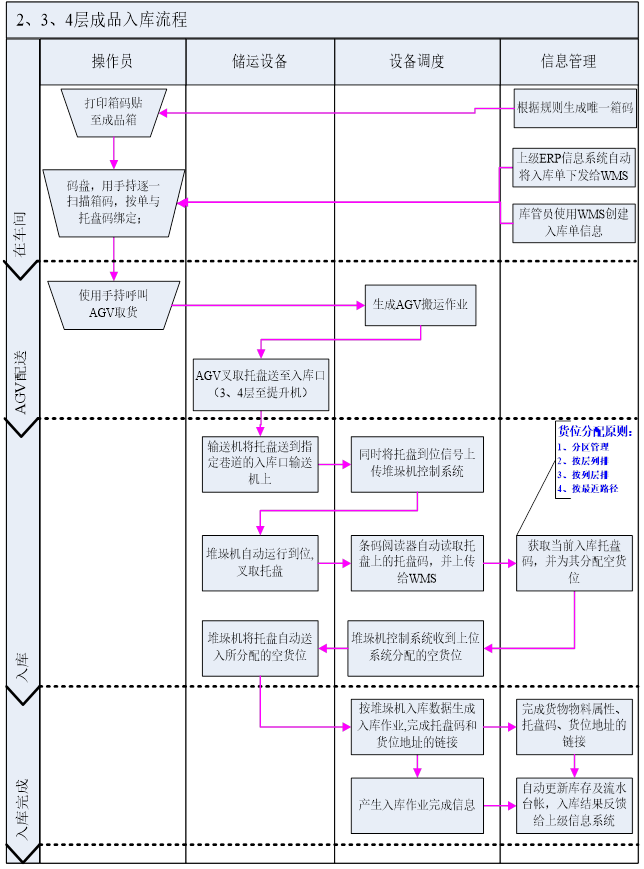
# 3.2.2 二三四层成品入库流程
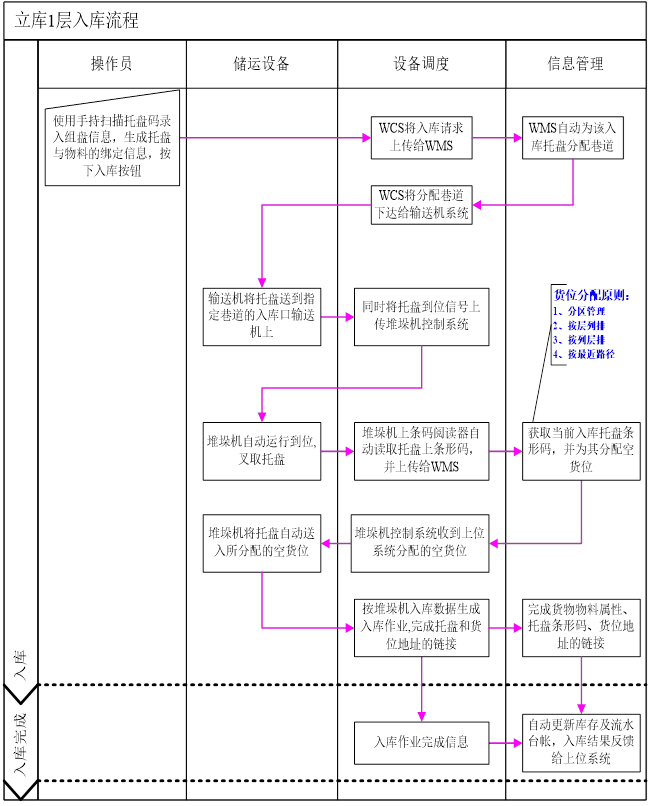
# 3.2.3 立库一层入库流程
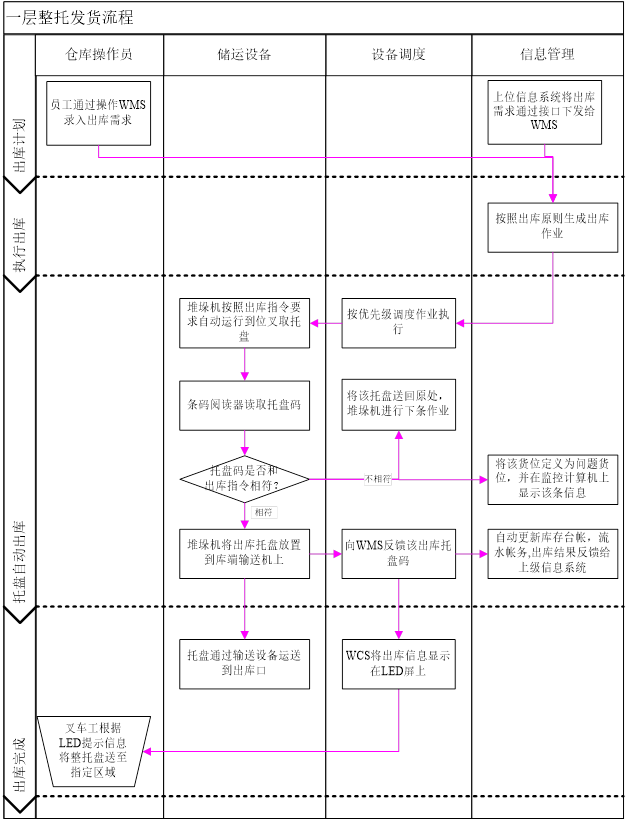
# 3.2.4 一层整托发货流程
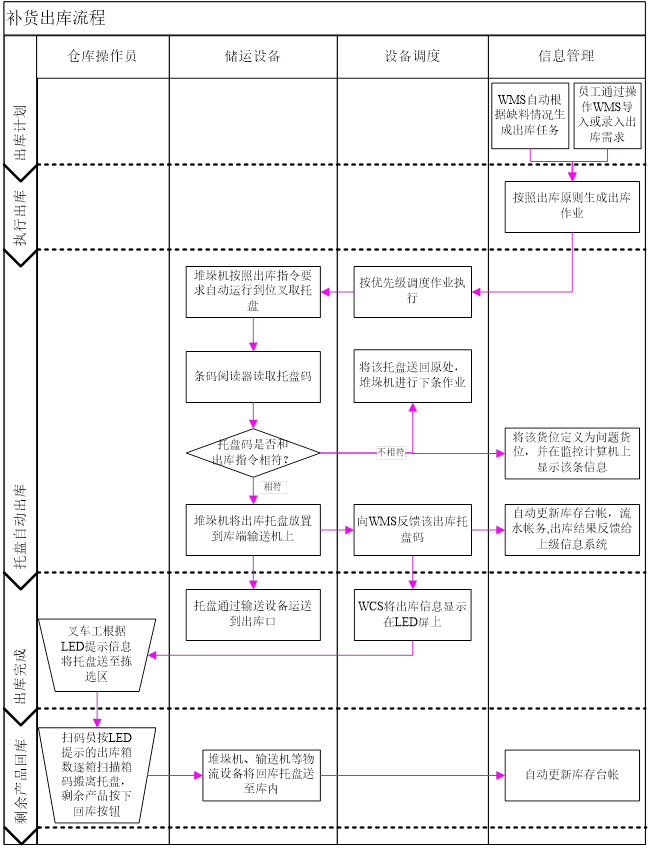
# 3.2.5 补货出库流程
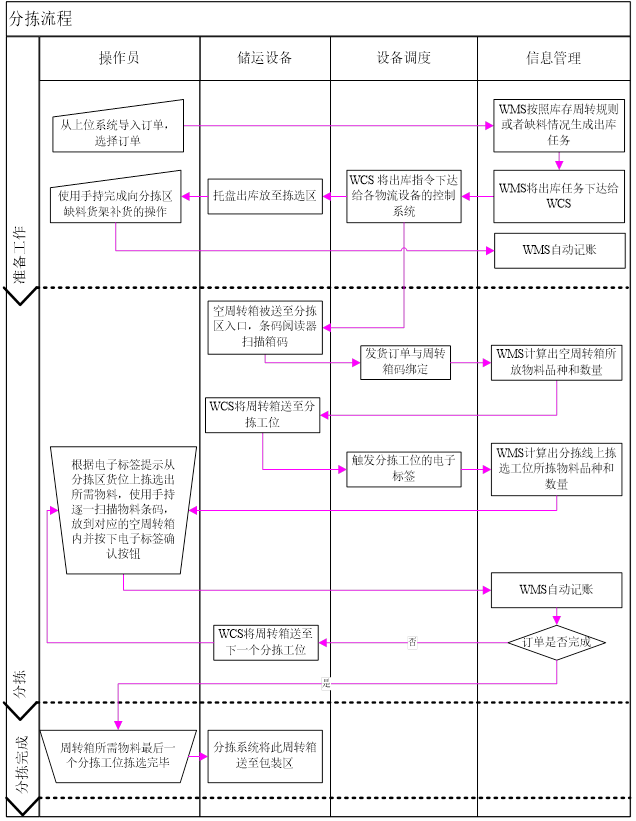
# 3.2.6 分拣流程
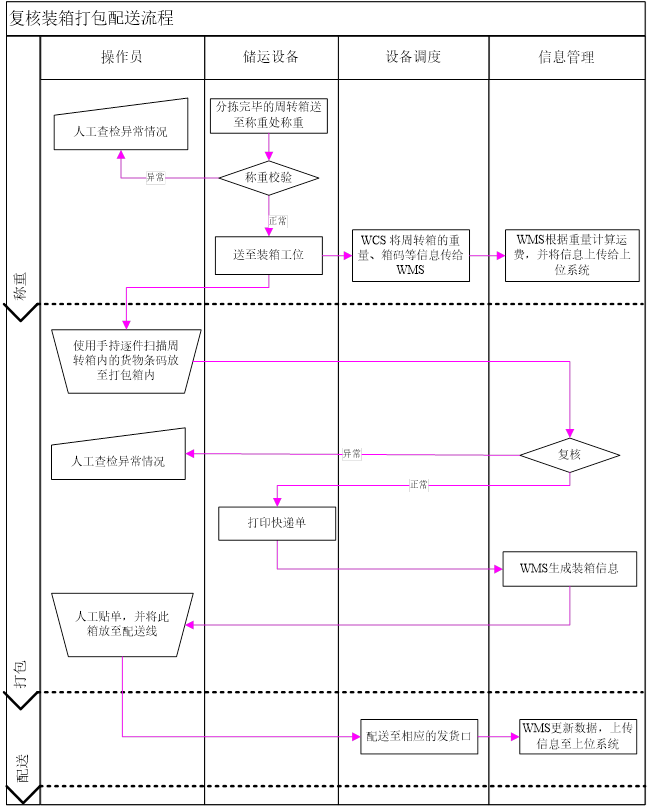
# 3.2.7 复核装箱打包配送流程
# 3.2.8 空托盘供给流程

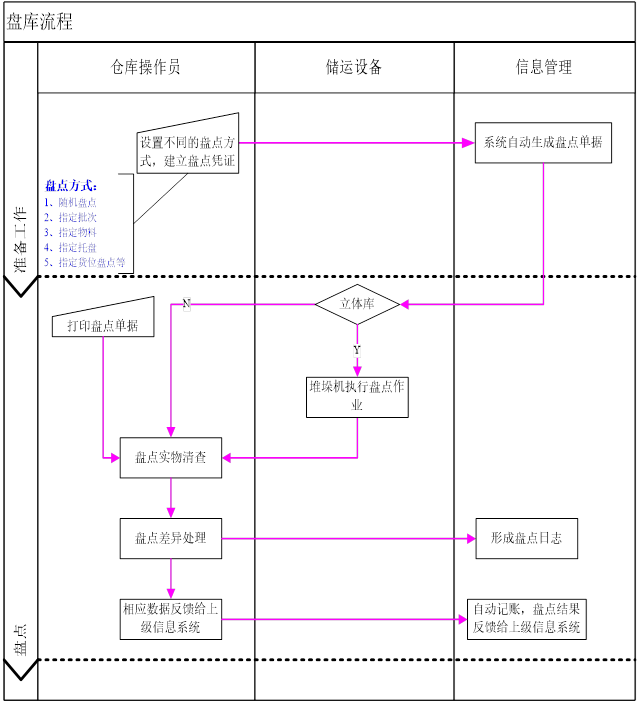
# 3.2.9 盘库流程
3.3系统物流流程说明
- 车间成品入库
车间将产品装箱、码盘后,通过人工电动叉车运送到升降机处,通过升降机将产品运输到立库二层传送带,通过传送带或背驮式AGV小车将产品运输到立库入口处,触发指令。
- 拣选区补货
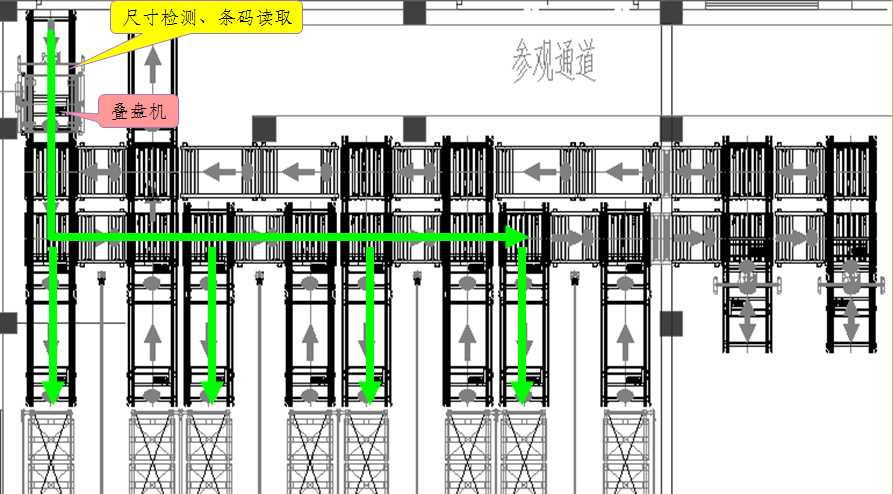
触发补货指令,将补货产品从立库货位通过堆垛机传送到立库一楼北侧补货口,通过人工电动叉车将补货产品运输到分拣区,通过手持RF扫描对拣选区进行补货。
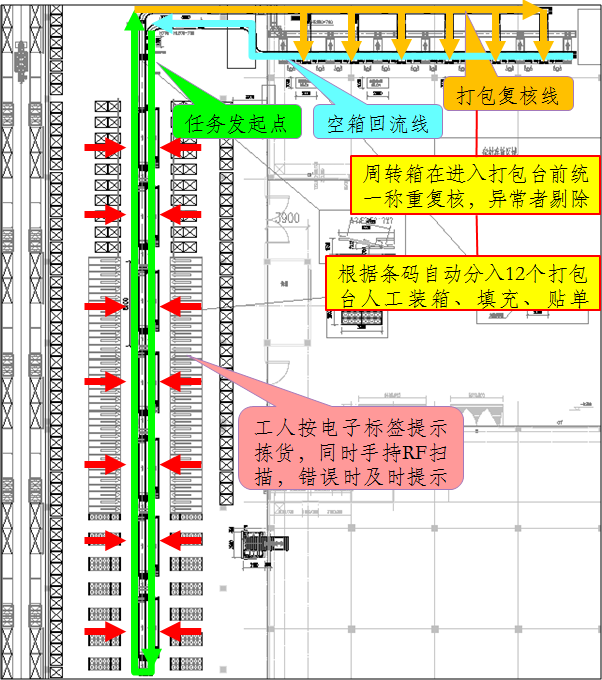
- 分拣
按电子标签指示灯和显示的数量进行捡货,在捡货时,工作人员同时手持RF对产品进行扫描,当出现错误时需及时提示拣选人员。
- 复核、装箱、打包
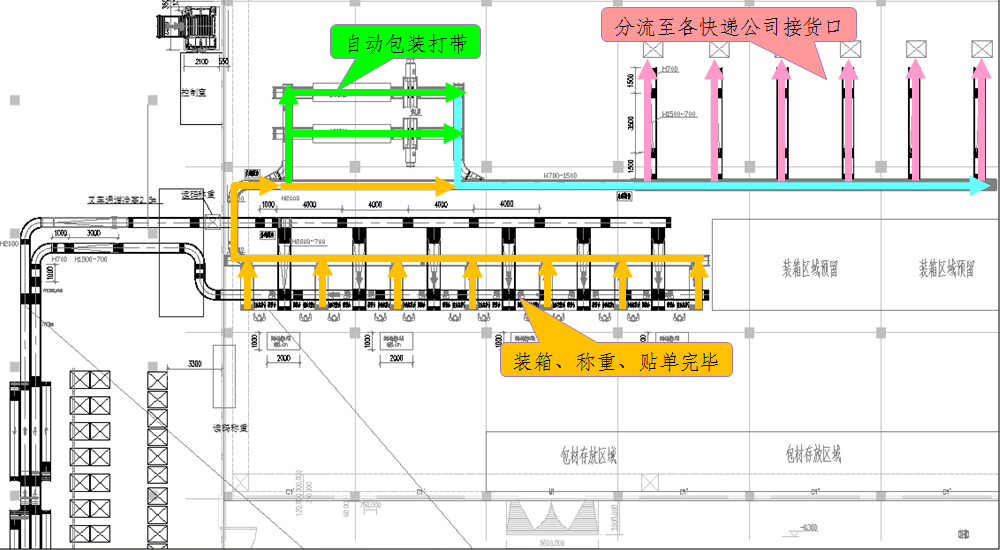
产品拣选完毕后,周转箱在打包前输送线上统一进行称重(称重精度0.01kg)复核(异常周转箱送至异常处理口处理)。到达装箱区后,工作人员装箱称重,方案共设计12个装箱窗口。装箱时不满箱可使用填充物填充,系统自动打印快递面单及发货单(系统需与电子秤、快递公司后台进行对接),快递面单粘贴完装箱完毕后使用收缩膜自动包装,自动平行两条打带,并开始传输。
- 配送
产品打包完毕后,在传送带上自动分流到各个快递公司接货口(共6个分拣口,不含异常出口)。
# 3.3.1 立库一层委外成品/空托入库流程
# 3.3.2 立库一层整托发货/补货流程
# 3.3.3 立库二层成品入库流程
# 3.3.4 立库二层空托出库流程
# 3.3.5 一层周转箱作业流程
# 3.3.6 一层纸箱作业流程
# 第四节 系统效率计算
# 4.1 系统能力需求
| 项目 | 设计参数 | 备注 |
|---|---|---|
| 品规数 | 358个 | 设计量适当放大 |
| 订单处理量 | 800 件/小时 | 根据现有数据预估,设计时需留有余量 |
| 工作时间 | 8小时工作制 |
# 4.2 堆垛机效率计算
# 4.2.1 堆垛机效率计算模型
- 堆垛机功能参数
| 水平高速运行速度: | Vxmax=160米/分钟 |
| 水平低速运行速度: | Vxmin=5米/分钟 |
| 垂直高速运行速度: | Vymax=40米/分钟 |
| 垂直低速运行速度: | Vymin=5米/分钟 |
| 货叉伸缩高速(有货时): | Vzmax1=40米/分钟 |
| 货叉伸缩高速(无货时): | Vzmax2=40米/分钟 |
| 货叉伸缩低速: | Vzmin=5米/分钟 |
| 水平运行行程: | X≈88.8米 |
| 垂直运行行程: | Y≈17.25米 |
| 货叉运行行程: | Z≈1.35米 |
| 堆垛机水平运行加速度: | ax=0.45米/平方秒 |
| 堆垛机垂直运行加速度: | ay=0.5米/平方秒 |
| 有货时伸叉加速度: | az=0.3米/平方秒 |
| 无货时伸叉加速度: | az=0.3米/平方秒 |
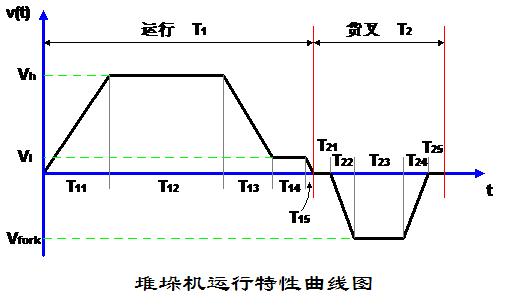
2 . 堆垛机作业效率计算方法
单一作业计算方法示意图:
复合作业计算方法示意图:
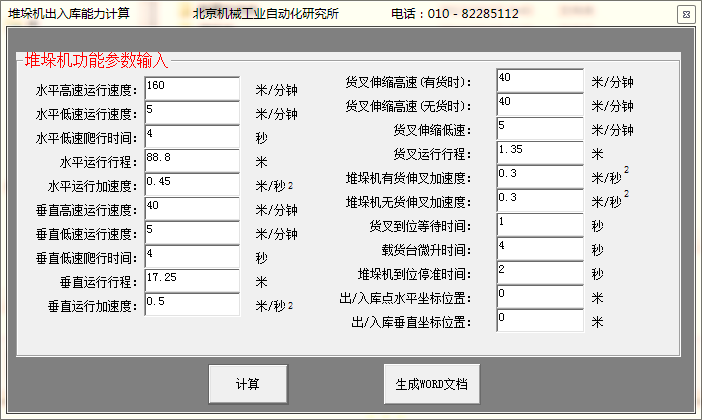
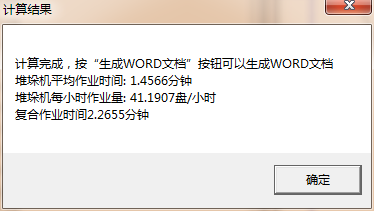
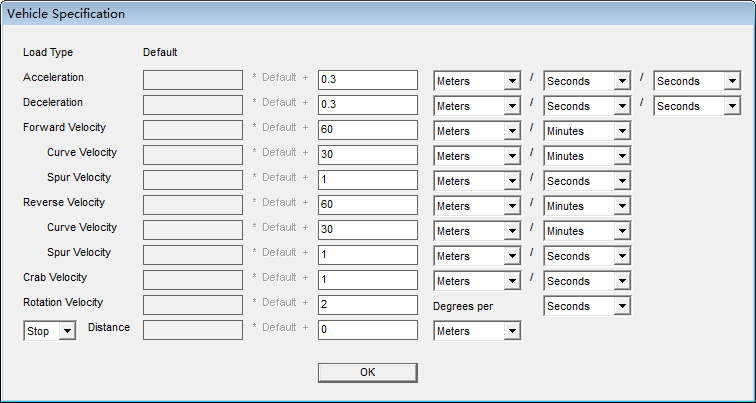
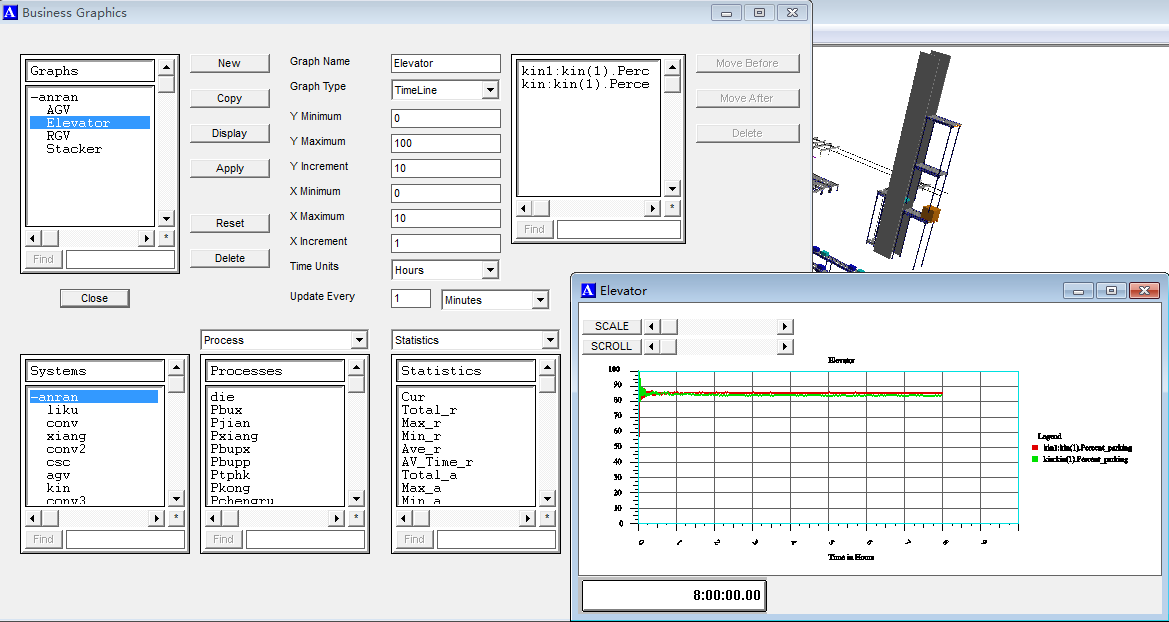
# 4.2.2 堆垛机作业效率计算工具
根据上述计算方法,结合我所自主开发的效率计算软件,软件界面如下图:
# 4.2.3 堆垛机作业效率详细计算
第一节 堆垛机出入库能力计算
1 ) 堆垛机功能参数:
水平高速运行速度: Vxmax=160 米/分钟
水平低速运行速度: Vxmin=5 米/分钟
垂直高速运行速度: Vymax=40米/分钟
垂直低速运行速度: Vymin=5米/分钟
货叉伸缩高速: Vzmax1=40米/分钟(有货时)
Vzmax2=40米/分钟(无货时)
货叉伸缩低速: Vzmin=5米/分钟
水平运行行程: X≈88.8米
垂直运行行程: Y≈17.25米
货叉运行行程: Z≈1.35米
堆垛机水平运行加速度: ax= 0.45米/平方秒
堆垛机垂直运行加速度: ay= 0.5米/平方秒
有货时伸叉加速度: az= 0.3米/平方秒
无货时伸叉加速度: az'= 0.3米/平方秒
2 )堆垛机各段运行时间计算:
堆垛机水平升速时间: T11' = Vxmax/ax = 160 ÷ 60 ÷0.45=5.9259 秒
对应堆垛机水平位移: S11' = 0.5 ×ax×T11'×T11' = 0.5 ×0.45×5.9259×5.9259=7.9012米
堆垛机水平减速时间: T13' = (Vxmax - Vxmin)/ax = (160-5) ÷ 60 ÷0.45 =5.7407 秒
对应堆垛机水平位移: S13' = 0.5 ×ax×T13'×T13' = 0.5 ×0.45×5.7407×5.7407=7.4151米
堆垛机水平爬行时间: T14' = 4 秒
对应堆垛机水平位移: S14' = Vxmin×T14' = 5÷ 60 ×4 =0.3333 米
堆垛机水平停车时间: T15' = Vxmin/ax = 5÷ 60 ÷0.45 =0.1852 秒
对应堆垛机水平位移: S15' = 0.5 ×ax×T15'×T15' = 0.5 ×0.45×0.1852×0.1852=0.0077米
堆垛机垂直升速时间: T11'' = Vymax/ay = 40 ÷ 60 ÷0.5=1.3333 秒
对应堆垛机垂直位移: S11'' = 0.5 ×ay×T11''×T11'' = 0.5 ×0.5×1.3333×1.3333=0.4444米
堆垛机垂直减速时间: T13'' = (Vymax - Vymin)/ay = (40-5) ÷ 60 ÷0.5 =1.1667 秒
对应堆垛机垂直位移: S13'' = 0.5 ×ay×T13''×T13''= 0.5 ×0.5×1.1667×1.1667=0.3403米
堆垛机垂直爬行时间: T14'' = 4 秒
对应堆垛机垂直位移: S14'' = Vymin×T14'' = 5÷ 60 ×4 =0.3333 米
堆垛机垂直停车时间: T15'' = Vymin/ay = 5÷ 60 ÷0.5 =0.1667 秒
对应堆垛机垂直位移: S15'' = 0.5 ×ay×T15''×T15'' = 0.5 ×0.5×0.1667×0.1667=0.0069米
货叉有货时:
堆垛机货叉升速时间: T22' = Vzmax/az = 40 ÷ 60 ÷0.3=2.2222 秒
对应堆垛机货叉位移: S22' = 0.5 ×az×T22'×T22' = 0.5 ×0.3×2.2222×2.2222=0.7407米
堆垛机货叉减速时间: T24' = T22' = 2.2222 秒
对应堆垛机货叉位移: S24' = S22' = 0.7407米
堆垛机货叉匀速位移: S23' =(Z-S22'-S24') = 1.35-0.7407-0.7407=-0.1315米
堆垛机货叉匀速时间: T23' = S23'/Vzmax = -0.1315÷40×60 =-0.1972秒
货叉无货时:
堆垛机货叉升速时间: T22'' = Vzmax/az' = 40 ÷ 60 ÷0.3=2.2222 秒
对应堆垛机货叉位移: S22'' = 0.5 ×az'×T22''×T22''= 0.5 ×0.3×2.2222×2.2222=0.7407米
堆垛机货叉减速时间: T24'' = T22'' + 2.2222 秒
对应堆垛机货叉位移: S24'' = S22'' = 0.7407米
堆垛机货叉匀速位移: S23'' = (Z-S22''-S24'') = 1.35-0.7407-0.7407=-0.1315米
堆垛机货叉匀速时间: T23'' = S23''/Vzmax = -0.1315÷40×60 =-0.1972秒
其它时间:
货叉到位等待时间 : T25'= 1 秒
堆垛机货叉微升时间: T32= 4 秒
堆垛机到位等待时间: T21= 2 秒
3 ) 堆垛机完成一个作业运行固定不变的时间:
水平运行中固定不变的时间: Tx0 = 5.9259+5.7407+4+0.1852=15.8519秒
垂直运行中固定不变的时间: Ty0 =1.3333+1.1667+4+0.1667=6.6667秒
货叉运行时间: Tz0 = 2×(2.2222+-0.1972+2.2222+1)+2×(2.2222 +-0.1972 +2.2222 +1)+2×4 +2×2 =32.9889秒
4 ) 堆垛机运行中可变的时间:
根据《有轨巷道式高层货架仓库 设计规范》 ZB J83 015-89 单循环作业时堆垛机平均作业周期如上图所示
取P1(1/5X,2/3Y)和P2(2/3X,1/5Y),即P1(17.76,11.5) 和P2(59.2,3.45)两点作业的平均值
P1点运行时间:
水平高速运行距离: S12' =17.76-(7.9012+7.4151+0.3333+0.0077 )=2.1026米
水平高速运行时间: T12' =2.1026÷160× 60 =0.7885秒
水平总计运行时间: Tp1x =15.8519+0.7885 =16.6403秒
垂直高速运行距离: S12'' =11.5-(0.4444+0.3403+0.3333+0.0069 )=10.375米
垂直高速运行时间: T12'' =10.375÷40× 60 =15.5625秒
垂直总计运行时间: Tp1y =6.6667+15.5625 =22.2292秒
到P1点时间:
TP1 = max{ Tp1x, Tp1y } =22.2292秒
P2点运行时间:
水平高速运行距离: S12' =59.2-(7.9012+7.4151+0.3333+0.0077 )=43.5426米
水平高速运行时间: T12' =43.5426÷160× 60 =16.3285秒
水平总计运行时间: Tp2x =15.8519+16.3285 =32.1803秒
垂直高速运行距离: S12'' =3.45-(0.4444+0.3403+0.3333+0.0069 )=2.325米
垂直高速运行时间: T12'' =2.325÷40× 60 =3.4875秒
垂直总计运行时间: Tp2y =6.6667+3.4875 =10.1542秒
到P2点时间:
TP2 = max{ Tp2x, Tp2y } =32.1803秒
5 ) 堆垛机平均作业时间:
Td = Tz + 2ave {TP1 ,TP2} =32.9889+ 2 × (22.2292+32.1803) ÷ 2 =87.3984秒 =1.4566分钟
堆垛机复合作业时间:
Td = 2 ×32.9889+22.2292+32.1803+15.54 =135.9273秒 =2.2655分钟
# 4.2.4 堆垛机作业效率计算结果
经上面详细计算说明书,可知堆垛机作业效率计算结果如下:
堆垛机单一平均作业效率:1.4566分钟/盘≈41盘/小时;
堆垛机复合平均作业效率:2.2655分钟/2盘≈53盘/小时;
4台堆垛机单一作业能力:41×4=164盘/小时
4台堆垛机复合作业能力:53×4=212盘/小时
# 4.3 输送机系统效率计算
# 4.3.1 输送机效率计算
输送机系统的工作能力考虑最大典型流量的输送道口在最繁忙的工况下的工作能力。此能力决定了整个输送机系统的工作能力。
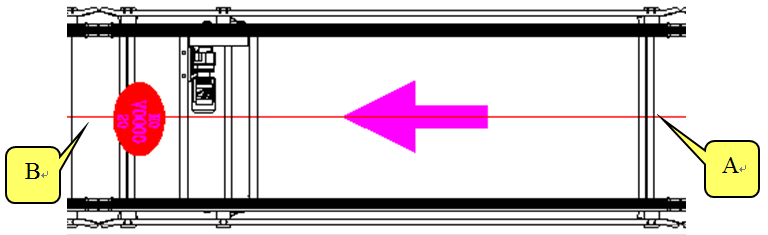
由于输送系统的连续输送,托盘从A点到B点,是一个完整的托盘输送周期。
输送机输送速度:16m/min,加速度a=0.3m/s²,托盘最大输送距离:S=3.5米
加速时间=减速时间:t1=t3=16÷0.3÷60=0.89秒
加速距离=减速距离:s1=s3=0.3×0.89²÷2=0.12米
匀速距离:s2=3.5-s1-s3=3.26米
匀速时间:t2=3.26÷16×60=12秒
作业周期为:T=t1+t2+t3=0.89+12+0.89=14秒
托盘在该处的输送效率:3600÷14=257盘/小时
单一输送机作业能力:257盘/小时
# 4.3.2 移载机效率计算
由于输送系统的连续输送,托盘从A点到B点,再到C点,是一个完整的托盘输送周期。
托盘输送速度:16m/min
移载机顶升速度:1.2m/min
托盘输送距离:S1=1800mm,S3=1700mm
托盘输送时间:T1=1.8÷16×60=6.75sec
T3=1.7÷16×60=6.375sec
托盘顶升距离:S2=70mm
托盘顶升时间:T2=3.5sec
在各个衔接过程中停顿时间:t=2sec
托盘在该处输送周期为:T=6.75+2+3.5+2+6.375=21sec
托盘在该处的输送效率:3600÷21=171盘/小时
单一移载机作业能力:171盘/小时
# 4.3.3 托盘穿梭车入库效率计算
1)穿梭车设计参数
在系统实际运行过程中,穿梭车在轨道上往返运行,现选取整个系统最繁忙的一段穿梭车运行情况分析:穿梭车从辊式机上接到空托盘后,输送到机器人下方的输送机上等待码垛。
| 穿梭车高速运行速度 | Vmax=120m/min |
| 穿梭车低速运行速度 | Vmin=5m/min |
| 链式移载输送速度 | Vyz=16m/min |
| 穿梭车加速度 | a=0.5m/s² |
| 穿梭车直线运行轨道长度 | Smax≈32m |
| 货盘移载运行行程 | Y≈1.5m |
2)二层成品入库最小效率计算
托盘在穿梭车上输送时间:t0=1.5÷16×60=5.625秒
穿梭车加速时间:t1=120÷0.5÷60=4秒
穿梭车减速时间:t2=t1=4秒
穿梭车加速距离:s1=0.5×4²÷2=4米
穿梭车减速距离:s2=0.5×4²÷2=4米
穿梭车直线运行最大行程:Smax=32米
穿梭车高速运行距离:s3=32-s1-s2=24米
穿梭车高速运行时间:t3=24÷120×60=12秒
穿梭车运行步骤如下:1、从入库输送机上接货物;2、加速运载货物;3、高速运载货物;4、减速运载货物;5、向出库口输送货物。
考虑各个衔接点的等待时间为:t4=2秒
穿梭车的作业周期为:
T1=t4+t0+t1+t3+t2+t0+t4
=2+5.625+4+12+4+5.625+2
=35秒
穿梭车从出库口返回输送机的运行时间为:
T2= t1+t3+t2
=4+12+4
=20秒
1台穿梭车每小时最小作业效率为:3600÷(35+20)=65盘/小时。
# 4.4 系统效率汇总
4台堆垛机单一作业能力:41×4=164盘/小时
4台堆垛机复合作业能力:53×4=212盘/小时
单一输送机作业能力:257盘/小时
单一移载机作业能力:171盘/小时
1台穿梭车最小作业效率为:65盘/小时
以上为理论计算值。
**
**
# 第五节 系统仿真报告
# 5.1 仿真目的与目标
# 5.1.1 仿真目的
验证设计方案合理性,发现问题和调整方案,经过方针分析和方案修改的交替决策支持过程,确定最终合理方案,对最终方案的流程、资源配置和系统能力及效率等给出定量评估结果,同时提供视频展示材料。
# 5.1.2 仿真目标
通过仿真决策智齿,确定设计方案的流程、作业调度、人力及资源配置方案,使最终方案达到所需的处理能力和合理效率要求,并对选定方案的各项指标做出定量仿真评价,主要包括:作业流程通畅性、瓶颈或隐形瓶颈缓解、堆垛机及叉车等关键设备的效率等。
# 5.2 仿真模型介绍
# 5.2.1 仿真软件选用
仿真采用美国 applied material公司开发的 AutoMod12.3仿真软件。它是目前市面上比较成熟的适用于三维离散事件系统仿真的软件之一,被广泛的应用于制造系统、仓储系统、物流处理、企业内部物流、港口、车站、配送中心,以及控制系统等的仿真分析、评价和优化设计等。我们仿真课题组已采用该软件完成了图书、烟草、邮政、食品、机械等多种行业的仿真决策支持工程。其包含的AS/RS子系统模块进行自动化立体库的建模与仿真,Pathmover子系统模块便于进行穿梭车系统和工位播撒系统的建模与仿真,Conveyor 子系统模块便于进行输送带系统的建模与仿真。
# 5.2.2 模型简介
- 模型前提假设
招标方的设计方案中,关于流程、作业调度等的设计与假设,是本仿真模型的基础,这里不进行详细叙述,下面仅列出需要说明的。
- 模型参数设置以及输入数据
仿真模型的布局参数、结构参数均取自CAD图纸,此处不提。
本仿真报告中,输入数据均采用招标文件和答疑文件给定的数据设定,部分重要输入数据如下:
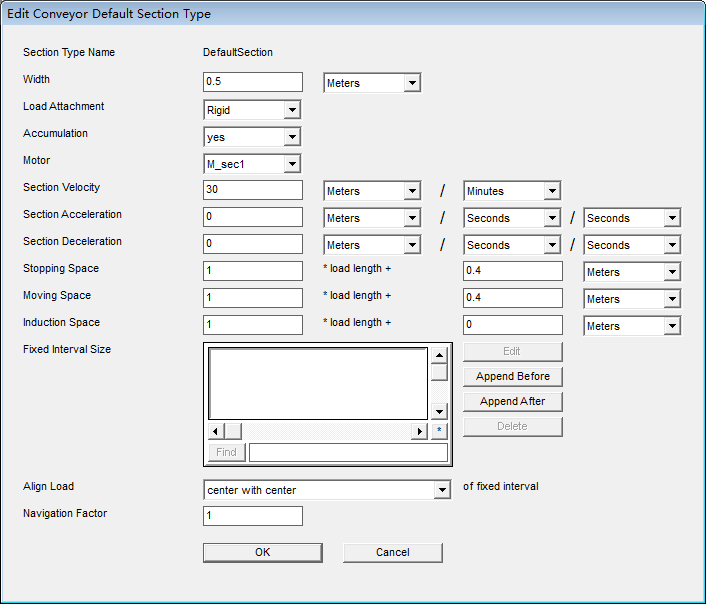
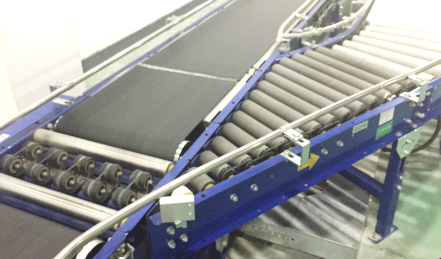
- 托盘输送线的输送速度为16m/min,如下图:
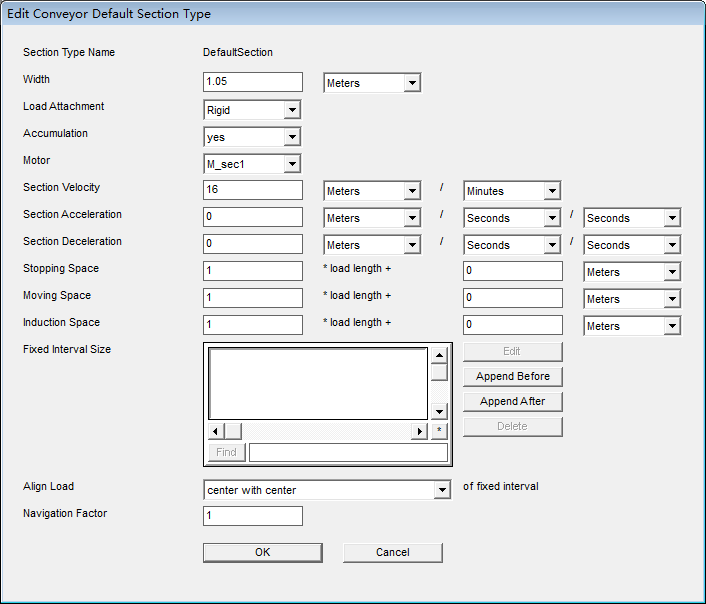
- 箱式输送线的输送速度为30m/min,如下图:
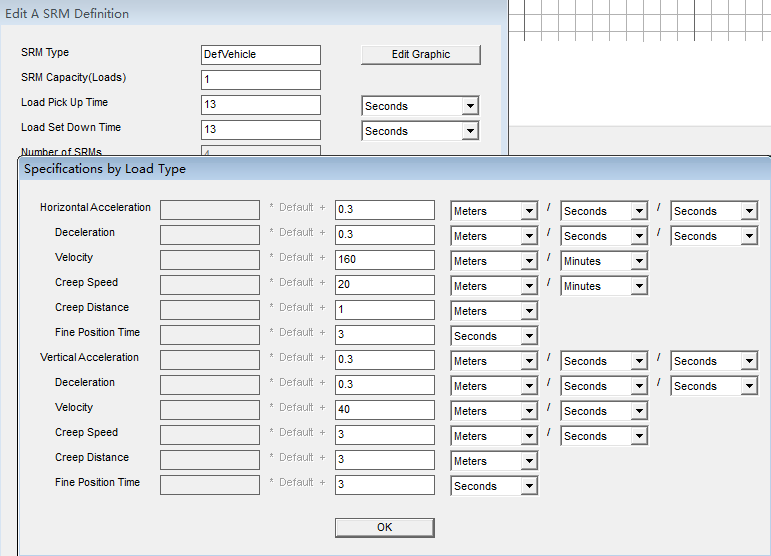
- 立体库堆垛机水平速度最大为160m/min,垂直速度最大为40m/min,加速度为0.3m/s2,货叉取放货周期为13s。
- 穿梭车的运行速度120m/min,加速度为0.3m/s2。
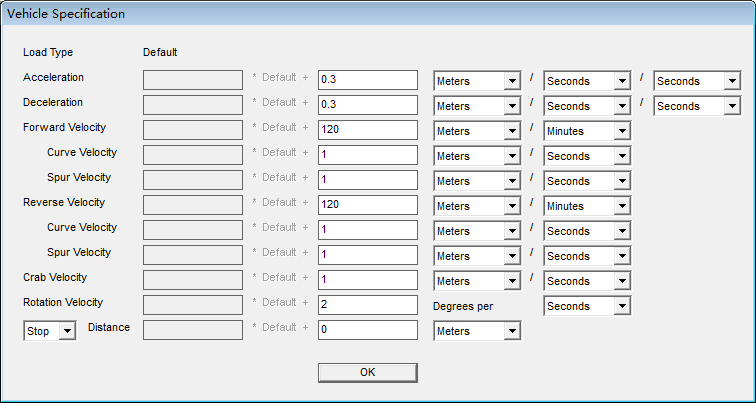
- AGV直线运行速度为60m/min,转弯速度为30m/min,加速度为0.3m/s2,如下图。
提升机的垂直速度45m/min;
托盘在位拣选时间为30s;
订单拣选时间为每单30s;
打包复核时间为55s一箱。
- 原始输入数据
| 箱式线 | |
|---|---|
| 拣选单数 | 480cs/h |
| 整箱出库量 | 320cs/h |
| 托盘线 | |
|---|---|
| 向分拣区补货 | 27p/h |
| 整托出库 | 5p/h |
| 分拣区托盘回库 | 3p/h |
| 委外品入库 | 5p/h |
| 成品入库 | 27p/h |
| 成品托盘出库 | 3p/h |
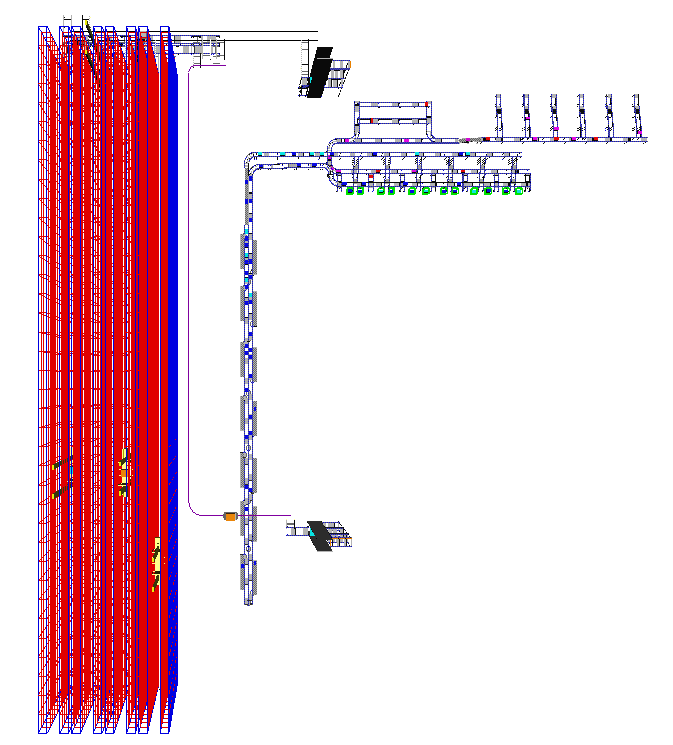
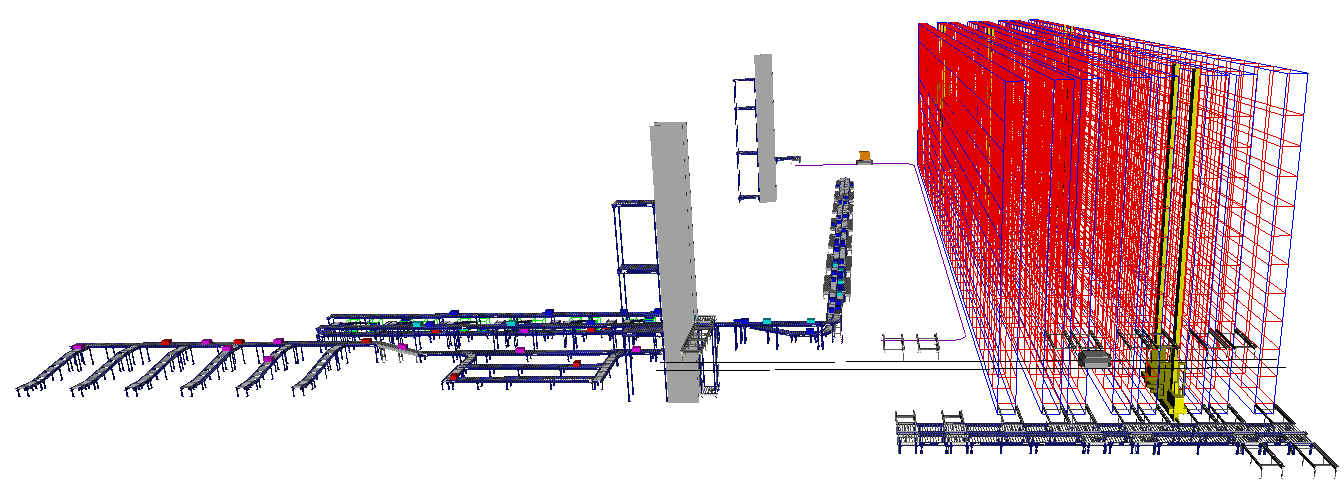
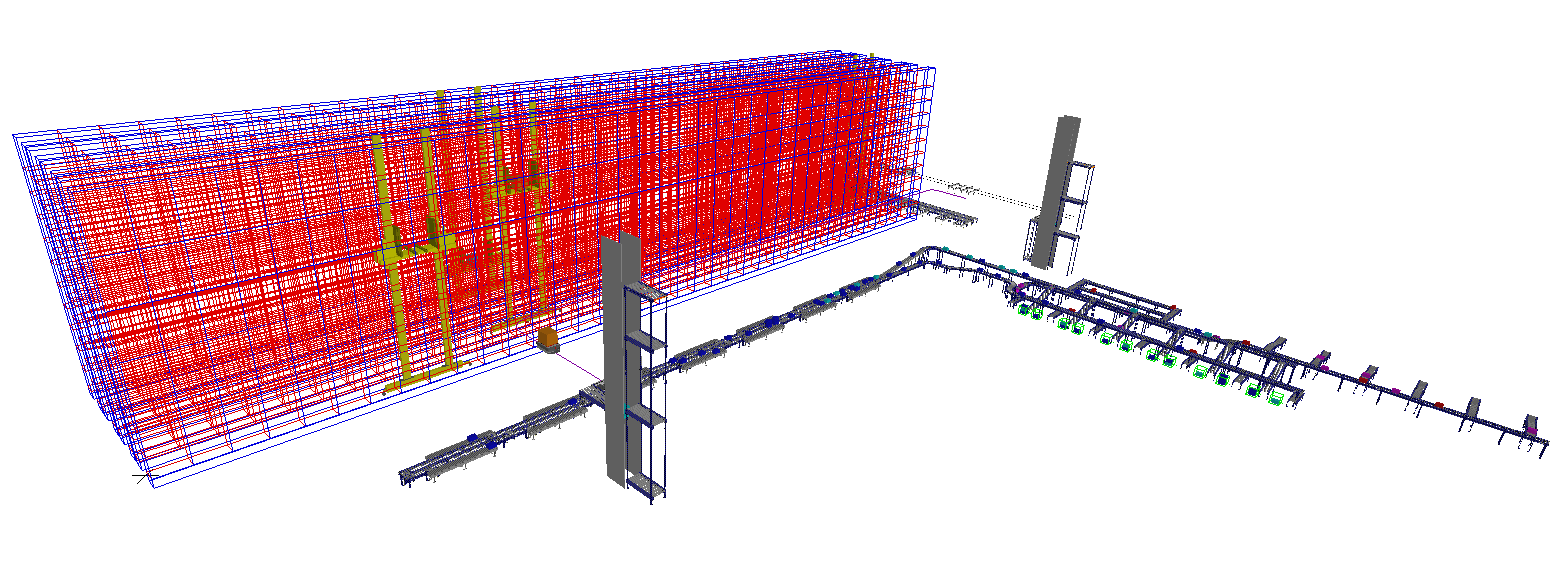
# 5.2.3 仿真模型概貌
# 5.3 仿真结果分析
经过仿真分析与方案优化,通过预定输入的数据测试系统的最大运行能力。
# 5.3.1 立库堆垛机使用情况分析
下表为堆垛机运行3个小时的过程数据及结论。
| 时间 | 堆垛机 | 载货运行 | 载货运行 | 载货运行 | 空载运行 | 空载运行 | 空载运行 | 空闲率 | 使用率 |
|---|---|---|---|---|---|---|---|---|---|
| 比例 | 周期数 | 平均时间 | 比例 | 周期数 | 平均时间 | ||||
| 第一小时 | 1 | 0.228 | 19 | 43.2 | 0.139 | 18 | 27.87 | 0.633 | 0.367 |
| 2 | 0.243 | 19 | 46 | 0.172 | 20 | 30.91 | 0.586 | 0.414 | |
| 3 | 0.217 | 18 | 43.31 | 0.169 | 19 | 31.99 | 0.615 | 0.385 | |
| 4 | 0.176 | 15 | 42.34 | 0.125 | 15 | 29.92 | 0.699 | 0.301 | |
| 第二小时 | 1 | 0.192 | 17 | 40.61 | 0.172 | 17 | 36.49 | 0.636 | 0.364 |
| 2 | 0.215 | 19 | 40.69 | 0.173 | 20 | 31.11 | 0.612 | 0.388 | |
| 3 | 0.182 | 16 | 40.94 | 0.144 | 17 | 30.44 | 0.674 | 0.326 | |
| 4 | 0.19 | 16 | 42.74 | 0.176 | 16 | 39.63 | 0.634 | 0.366 | |
| 第三小时 | 1 | 0.235 | 19 | 44.53 | 0.169 | 19 | 32.08 | 0.596 | 0.404 |
| 2 | 0.219 | 19 | 41.5 | 0.162 | 19 | 30.63 | 0.619 | 0.381 | |
| 3 | 0.205 | 18 | 40.94 | 0.169 | 19 | 31.98 | 0.627 | 0.373 | |
| 4 | 0.192 | 16 | 43.17 | 0.153 | 16 | 34.41 | 0.655 | 0.345 | |
| 平均值 | 0.208 | 17.58 | 42.498 | 0.160 | 17.9167 | 32.288 | 0.632 | 0.368 |
注:空闲率为堆垛机在统计时间内的非作业时间与总时间的比例,使用率=1-空闲率。
因此堆垛机的平均使用率为36.8%,最大作业能力为17.58/0.368=47.77盘/小时。
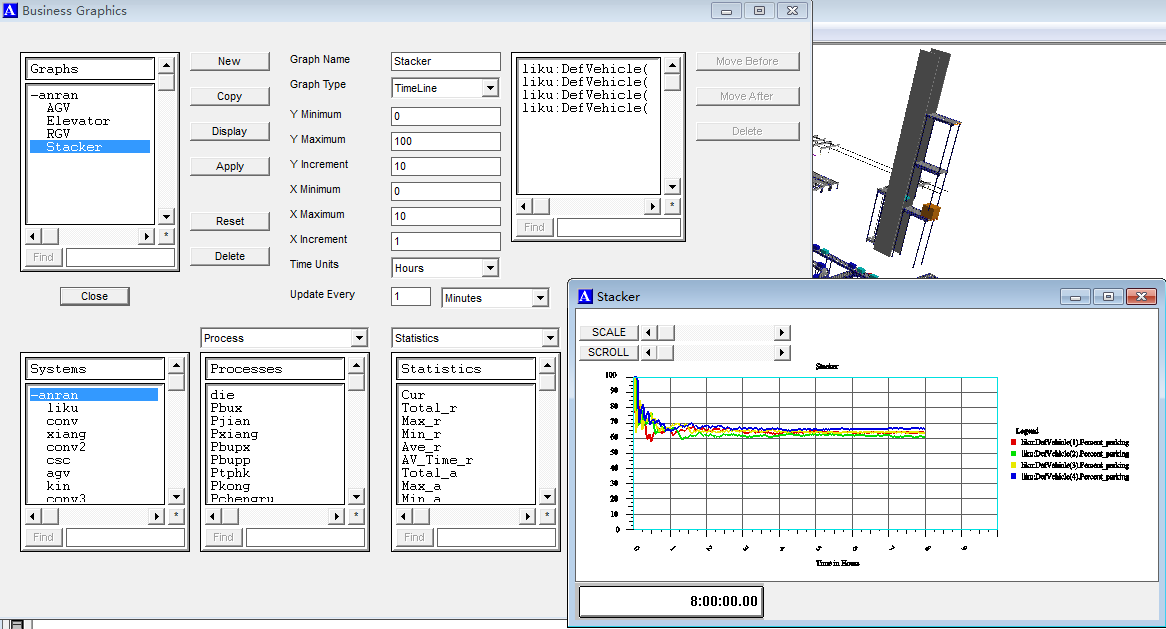
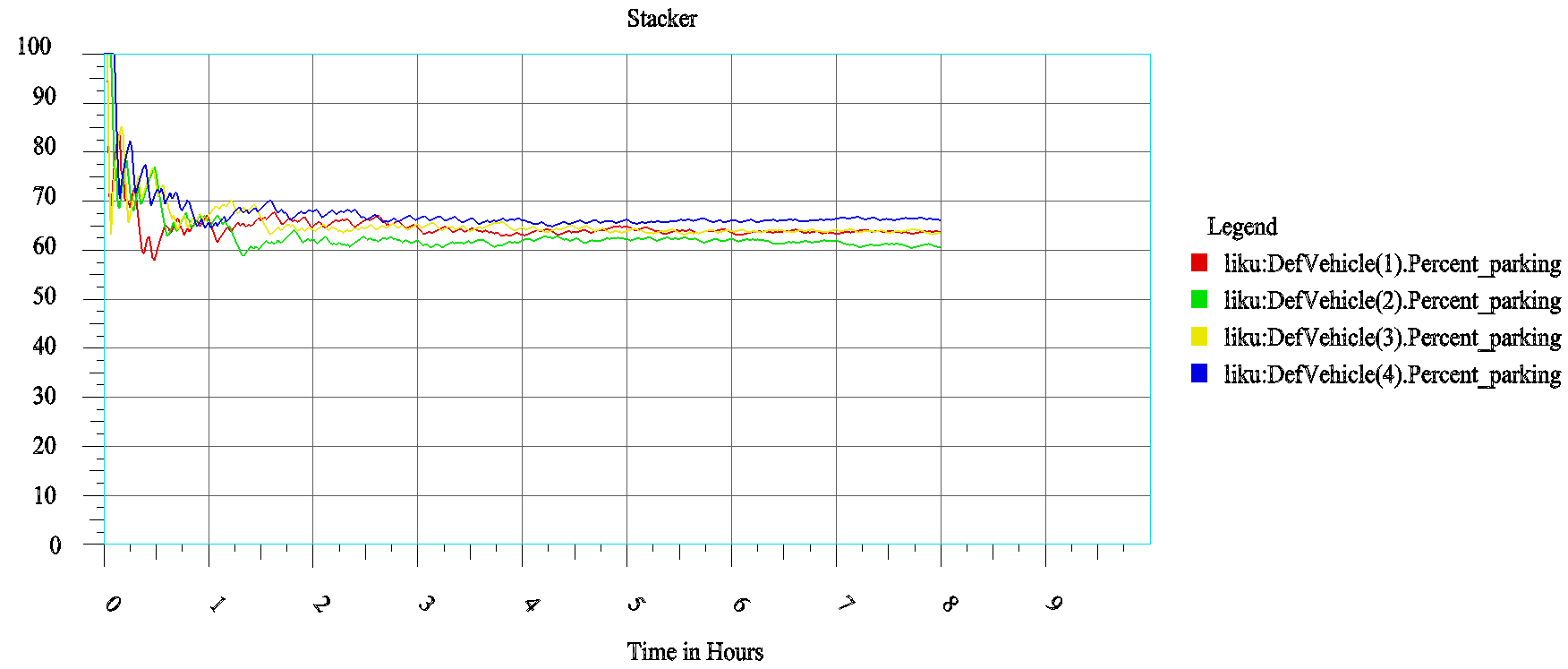
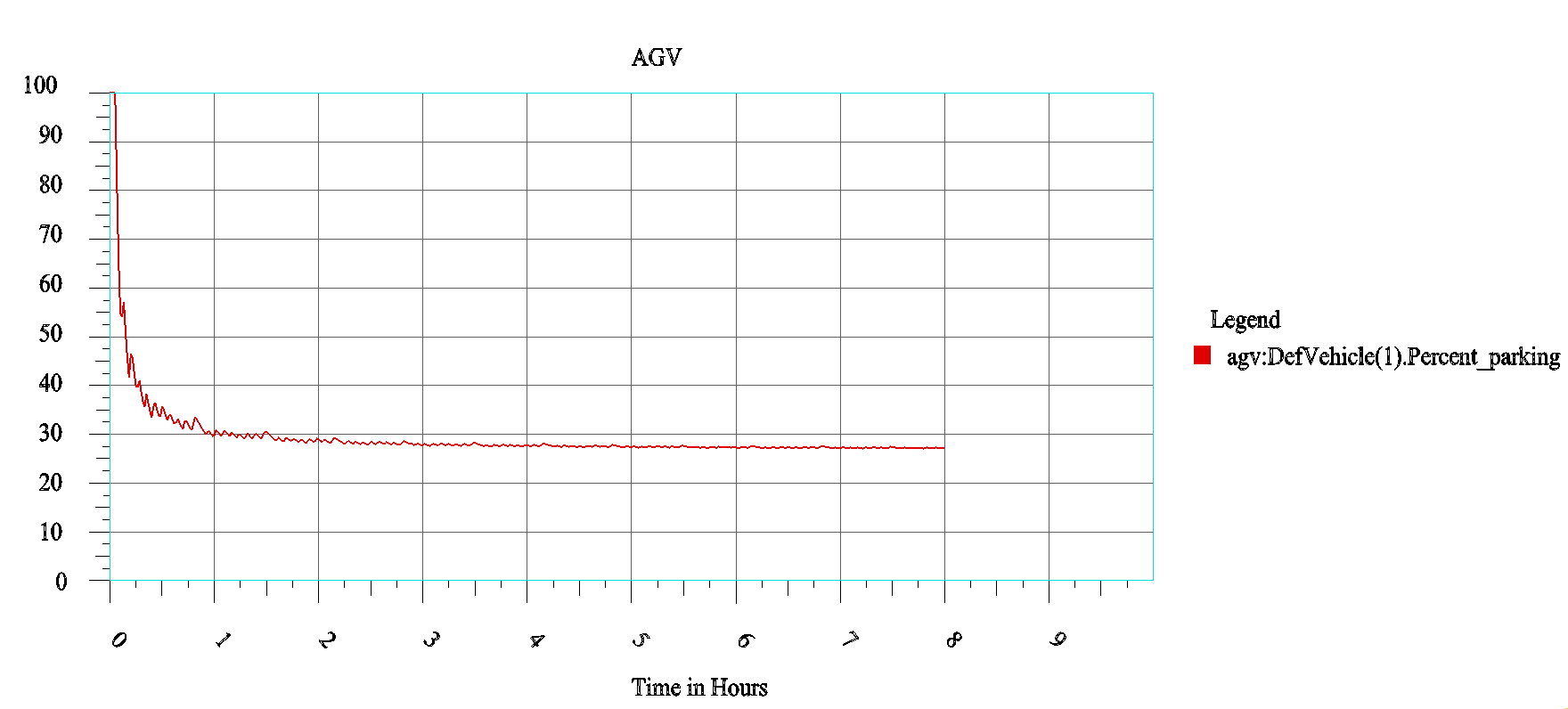
8小时工作时间内,堆垛机的空闲率随时间的变化曲线如下:
# 5.3.2直线穿梭车使用情况分析
下表为穿梭车运行3个小时的过程数据及结论。
| 时间 | 载货运行 | 载货运行 | 载货运行 | 空载运行 | 空载运行 | 空载运行 | 空闲率 | 使用率 |
|---|---|---|---|---|---|---|---|---|
| 比例 | 周期数 | 平均时间 | 比例 | 周期数 | 平均时间 | |||
| 第1个小时 | 0.207 | 30 | 24.88 | 0.197 | 29 | 24.4 | 0.596 | 0.404 |
| 第2个小时 | 0.216 | 31 | 25.1 | 0.211 | 31 | 24.47 | 0.573 | 0.427 |
| 第3个小时 | 0.21 | 30 | 25.21 | 0.198 | 29 | 24.57 | 0.592 | 0.408 |
| 平均值 | 0.211 | 30.33 | 25.063 | 0.202 | 29.67 | 24.48 | 0.587 | 0.413 |
注:空闲率为穿梭车在统计时间内的非作业时间与总时间的比例,使用率=1-空闲率。
因此直线穿梭车使用率为41.3%,最大作业能力为:30.33/0.413=73.44盘/小时。
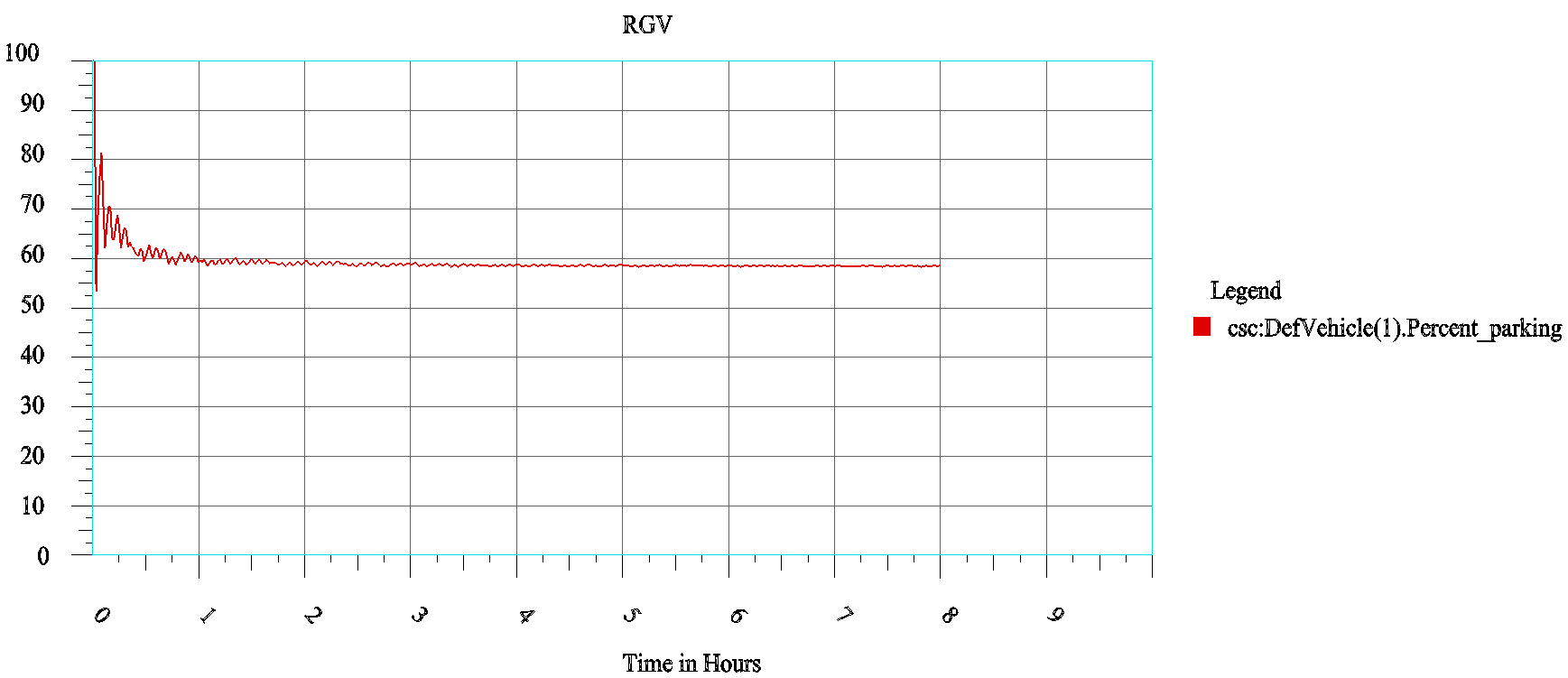
8小时工作时间内,直线穿梭车的空闲率随时间的变化曲线如下:

# 5.3.3 AGV使用情况分析
下表为AGV运行3个小时的过程数据及结论。设置AGV的停车位置到南边提升机的接口位置,以使AGV能尽快接到待入库的成品。
| 时间 | 载货运行 | 载货运行 | 载货运行 | 空载运行 | 空载运行 | 空载运行 | 前往停车点 | 前往停车点 | 前往停车点 | 空闲率 | 使用率 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 比例 | 周期数 | 平均时间 | 比例 | 周期数 | 平均时间 | 比例 | 周期数 | 平均时间 | |||
| 第1个小时 | 0.389 | 15 | 93.41 | 0.035 | 15 | 8.34 | 0.295 | 12 | 88.43 | 0.281 | 0.719 |
| 第2个小时 | 0.416 | 16 | 93.64 | 0.036 | 15 | 8.69 | 0.295 | 12 | 88.43 | 0.253 | 0.747 |
| 第3个小时 | 0.392 | 15 | 94.03 | 0.035 | 15 | 8.34 | 0.295 | 12 | 88.43 | 0.279 | 0.721 |
| 平均值 | 0.399 | 15.33 | 93.69 | 0.035 | 15 | 8.46 | 0.295 | 12 | 88.43 | 0.271 | 0.729 |
注:空闲率为AGV在统计时间内的非作业时间与总时间的比例,使用率=1-空闲率。
因此AGV使用率为72.9%,最大作业能力为:15.33/0.729=21.03盘/小时。
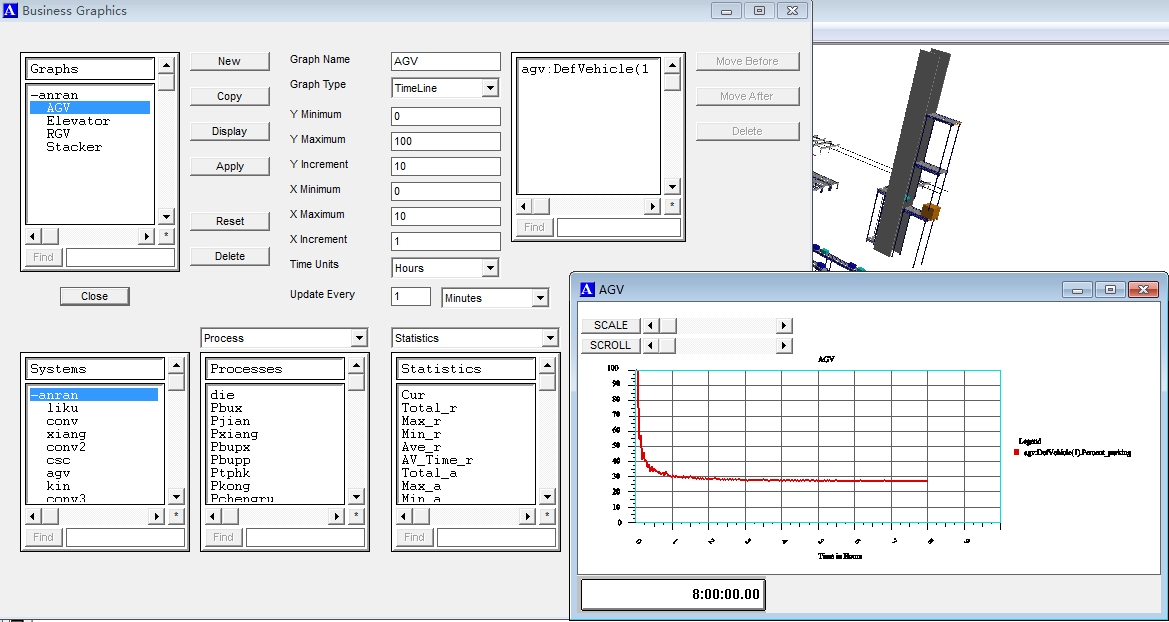
8小时工作时间内,AGV的空闲率随时间的变化曲线如下:
# 5.3.4 提升机使用情况分析
下表为提升机运行3个小时的过程数据及结论。
| 时间 | 提升机 | 载货运行 | 载货运行 | 载货运行 | 空载运行 | 空载运行 | 空载运行 | 空闲率 | 使用率 |
|---|---|---|---|---|---|---|---|---|---|
| 比例 | 周期数 | 平均时间 | 比例 | 周期数 | 平均时间 | ||||
| 第1个小时 | 北 | 0.075 | 15 | 17.9 | 0.066 | 15 | 15.91 | 0.859 | 0.141 |
| 南 | 0.082 | 15 | 19.73 | 0.082 | 15 | 19.73 | 0.836 | 0.164 | |
| 第2个小时 | 北 | 0.069 | 15 | 16.66 | 0.069 | 15 | 16.66 | 0.861 | 0.139 |
| 南 | 0.081 | 15 | 19.47 | 0.081 | 15 | 19.33 | 0.838 | 0.162 | |
| 第3个小时 | 北 | 0.072 | 15 | 17.28 | 0.069 | 15 | 16.53 | 0.859 | 0.141 |
| 南 | 0.077 | 15 | 18.45 | 0.076 | 15 | 18.31 | 0.847 | 0.153 | |
| 平均值 | 0.076 | 15 | 18.25 | 0.074 | 15 | 17.75 | 0.85 | 0.15 |
注:空闲率为提升机在统计时间内的非作业时间与总时间的比例,使用率=1-空闲率。
因此提升机使用率为15%,最大作业能力为:15/0.15=100盘/小时。
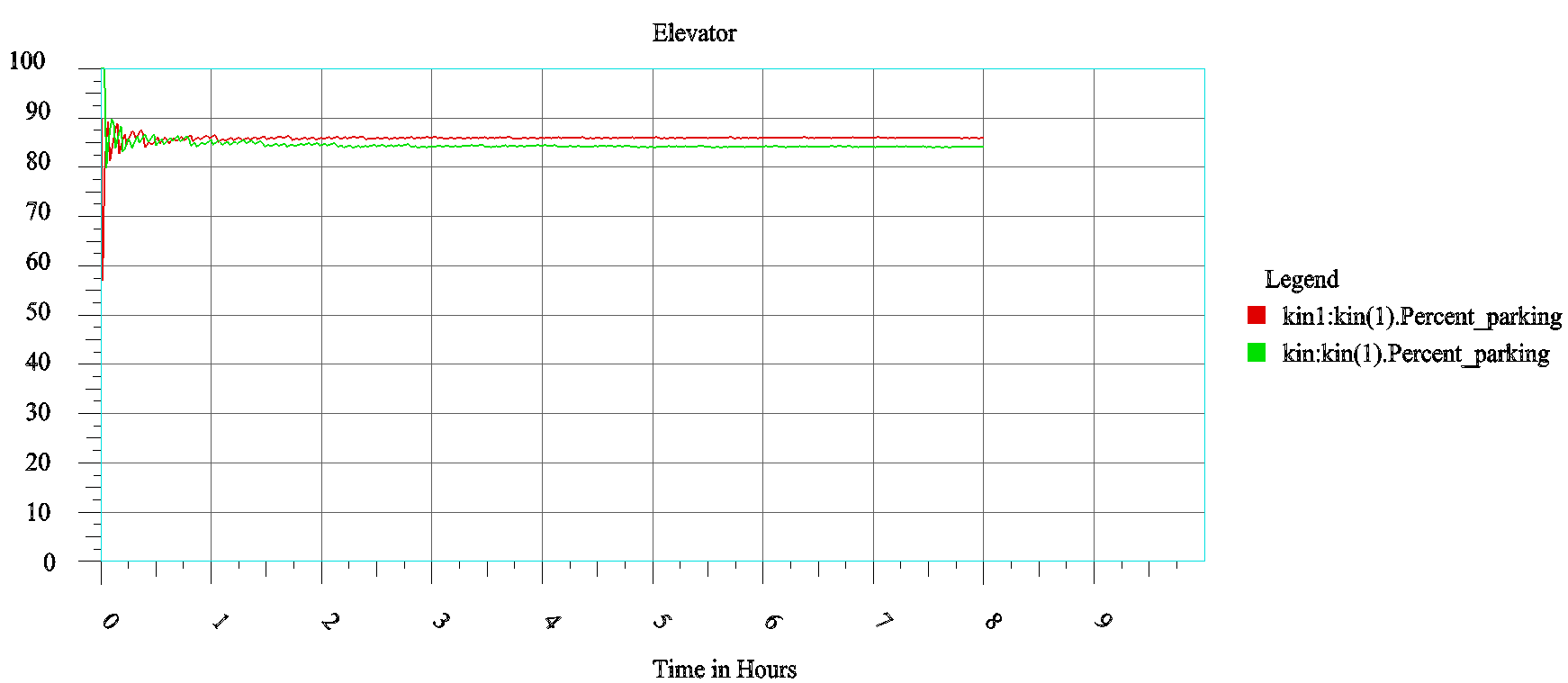
8小时工作时间内,提升机的空闲率随时间的变化曲线如下:
# 5.4 仿真结论
根据以上仿真,设备的仿真结果如下:
堆垛机的平均使用率为36.8%,最大作业能力为17.58/0.368=47.77盘/小时。
直线穿梭车使用率为41.3%,最大作业能力为:30.33/0.413=73.44盘/小时。
AGV使用率为72.9%,最大作业能力为:15.33/0.729=21.03盘/小时。
提升机使用率为15%,最大作业能力为:15/0.15=100盘/小时。
需要注意的是,同一流程中的最大作业能力取决于本流程中的瓶颈设备的效率,入南边提升机成品入库的最大作业能力取决于AGV,即一个小时处理约21盘,北边的提升机入库的最大作业能力取决于“直线穿梭车的最大作业效率-AGV的作业效率”,即52盘/小时。
箱式输送线在如上原始输入数据条件下,能够处理800件/小时。
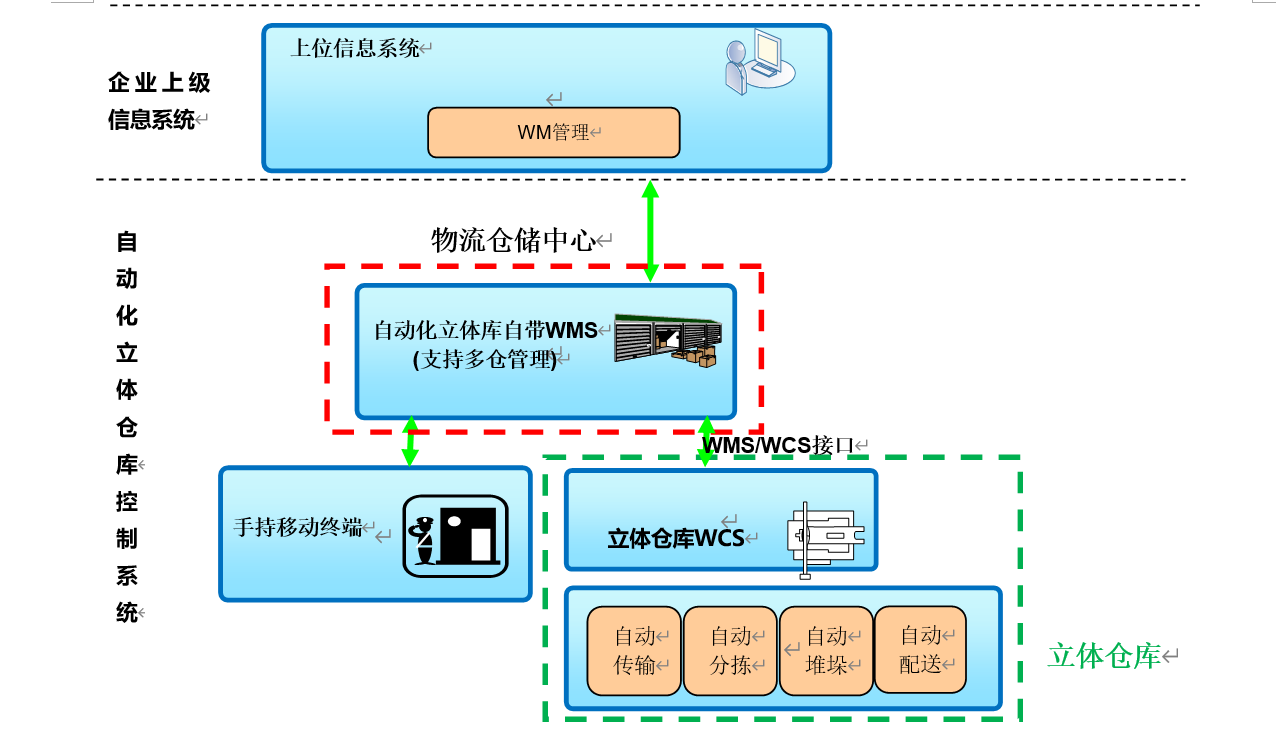
# 第六节 系统结构
# 6.1 系统总体结构
物流计算机调度和信息管理系统硬件结构采用客户机/服务器模式。控制系统采用工业以太网。堆垛机、输送机控制设备通过现场总线PROFINET 进行通讯。
本物流系统主要由托盘自动化立体仓库、托盘输送系统、箱式输送系统、电控系统、计算机信息系统等部份组成。本项目总体结构图如下图所示。
系统结构示意图
# 6.2 系统硬件结构
物流计算机调度和信息管理系统硬件结构采用B/S以及C/S模式。控制系统采用无线以太网工业控制网络。堆垛机、输送系统、分拣线控制设备通过无线以太网进行通讯。系统硬件结构如下图所示。
系统硬件结构示意图
# 6.3 系统软件结构
系统软件结构采用模块化集成模式。系统软件结构如下图所示。
系统软件结构示意图
# 第三章 分项技术描述
# 第一节 组合式货架系统
# 1.1 设计参考标准
货架的设计、制造、安装调试以下标准:
《钢货架结构设计》 (CECS 23:90)
《钢结构设计规范》 (GB50017-2003)
《有轨巷道式高层货架仓库设计规范》 (JB/T9018—99)
《建筑结构载荷规范》 (GB50009—2001)
《建筑抗震设计规范》 (GB50011—2001)
《构筑物抗震设计规范》 (GB50191-93)
《立体仓库焊接式钢结构货架技术条件》 (JB/5323—91)
《建筑设计防火规范》 GBJ16—87(2001修订版)
《冷弯薄壁型钢结构技术规范》 (GB 500188—2002)
《巷道堆垛起重机高架仓库公差、变形和间隙的计算(FEM9.831)
《钢制货架》 (JIS S1040-1994)
# 1.2 货架技术参数
| 货架形式 | 采用独立式、组合横梁式货架,不与建筑物相连 |
| 层数 | 11层 |
| 列数 | 37列(双货位) |
| 排数 | 8排 |
| 货位数 | 4巷道×2排×37×2列×11层+48悬臂=6560托盘 |
| 货格尺寸 | 2400mm(立柱中心距)×1100mm(总深度)×1725mm(包括横梁) |
| 托盘尺寸 | 1200mm(长)×1000mm(宽)×170mm(高) |
| 单元尺寸 | (含托盘)1200mm(长)×1000mm(宽)×1500mm(高) |
| 重量 | (含托盘)500kg |
| 立柱选型 | 将立柱分上下两段,采用M100D,截面100×70,厚度2.0mm |
| 横梁选型 | 采用一体梁,H90,截面90×50,厚度1.5mm |
| 货架材料 | Q345,Q235 |
| 地面安装 | 货架、地轨同地面的连接采用喜利得化学螺栓方式 |
| 天轨与地轨 | 天轨:10010010角钢,地轨:38Kg/m轨, L=94m/套,数量:4套; |
| 地震烈度 | 威海地区地震设防烈度7度,设计地震加速度值0.10g |
| 货架背拉 | 为了加强货架的稳定性,在单排货架背部和双排货架之间设有垂直拉杆,在垂直拉杆对应位置设有水平拉杆 |
| 货架表面处理 | 表面处理为静电喷涂,厚度60μm,质量符合GB/T6807-2001标准; |
# 1.3 货架系统特点
1、货架采用组合式横梁货位,采用成熟先进的货架技术,设计合理、结构新颖、使用安全可靠。确保货架正常载荷下使用寿命超过50年。
2、货架系统设计考虑预留消防、制冷、通过管道空间、支承部位、支承载荷。货架片背部留有至少300mm净空,便于消防系统的支架安装。货架设计考虑防雷接地。
3、高层货架具有良好的刚度和强度,可抗震设防烈度符合本地区抗震要求。
4、采用独立式、组合横梁式货架,不与建筑物相连。
5、货架立柱、横梁、支撑、插件等构件的材质、规格、尺寸和偏差详细参见下一节。
# 1.4 货架结构
横梁式自动化立体仓库货架主要由:货架片、横梁、水平拉杆、垂直拉杆、天轨吊梁、天轨端部网架、天轨等组成。


| 内容 | 说明 | 附图 |
|---|---|---|
| 货架 安装 | 货架框架由锁紧的钢结构组成,可以形成一个静定系统进行工作,以确保整体稳定性。 | 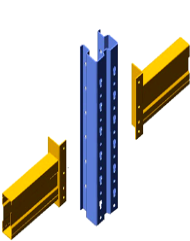 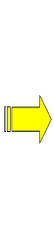 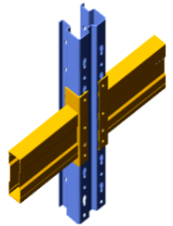 |
| 立柱 | SLⅡ型立柱,孔距为75mm,横梁可以在货架全高范围内做间隔为75mm的调整。具有结构合理、造型美观、承载能力强、重量轻的特点。 |  |
| 横梁 | 具有惯性矩大,抗弯截面模量大,承载力较大的特点。挂片同立柱连接,并插入保险销来保证货架的安全性,安装方便快捷。 |  |
| 垂直拉杆装置 | 垂直拉杆装置分布在双排背靠背货架之间和单排货架背后,对整个货架系统起到顺巷道方向的稳定作用。 垂直拉杆装置通过螺栓同货架立柱联系在一起。 | 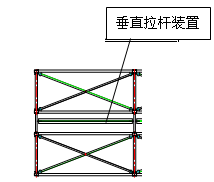 |
| 水平拉杆装置 | 水平拉杆装置分布在相对与垂直拉杆位置的货架各层,对整个结构的平面方向起到稳定作用。 水平拉杆通过螺栓同货架横梁联系在一起。 | 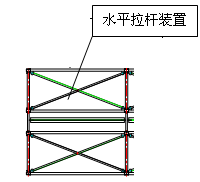 |
| 吊梁 | 吊梁是货架同堆垛机系统的接口部位,主要作用为安装堆垛机运行的天轨,同时通过螺栓连接将整个货架系统连在一起。 |  |
| 存储 形式 | 为充分利用自动化物流系统的空间,提高空间利用率,一个货格里规划放置2个托盘货物。两个托盘货物之间、与货架横梁之间的相对位置详见附件图纸。 | 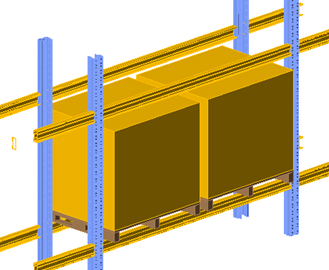 |
# 1.5 货架安装精度
| 立柱 | 立柱全长调节孔距累计误差不大于±2 mm,相临孔距误差小于1 mm |
|---|---|
| 货架全长尺寸极限偏差不大于2mm | |
| 立柱片弯曲误差小于1/1000 | |
| 立柱片底板高低差极限偏差 0.5mm | |
| 立柱制造长度偏差不超过±2mm | |
| 立柱与安装地面垂直偏差小于1/1000mm | |
| 安全系数不小于1.75 | |
| 横梁 | 横梁装配后两端高低误差小于±1mm |
| 承载最大载荷时横梁挠度不大于L/250 | |
| 各横梁高度尺寸极限偏差2mm | |
| 全长范围内横梁水平偏差小于L/200㎜,最大不超过0.5㎜。 | |
| 未承载承重梁允许有上拱,但不得有下拱 | |
| 长度误差不大于1mm | |
| 安全系数不小于1.55 |
# 1.6 货架强度
一列货架满载荷时立柱顶部变形:≤10mm (分别在X、Y、Z方向)。
横梁满载荷下挠度为L/250,未承载承重梁允许有上拱,但不得有下拱。
# 1.7 表面处理
1、前处理
前处理系统分三部分组成,第一部分采用酸洗,磷化;第二部分为水洗,使表面的酸洗,磷化液中和。第三为烘干。
整个表面处理过程采用悬挂链方式,前二个处理系统采用喷淋装置,使接触面更广,清洗更干净,速度快。克服了传统的浸泡时间长,不彻底等缺陷。
2、表面喷涂
涂装工艺要求在涂装线上作业,再经烘干固化,保证涂层表面丰满平滑,无色差,无缩孔包花等现象,涂层厚度为60um。质量均按按GB/T6807-2001标准。
3、表面处理要求
| 喷涂工艺 | 货架表面处理采用环氧树指粉末静电喷涂工艺,涂层厚度60~80微米 |
|---|---|
| 附着力 | 静电喷粉附着力达到GB/T 6807-2001标准中0级要求 |
| 硬度 | 硬度(耐磨性)为普通硝基漆的100倍以上,达到GB/T 6739-2006标准中的2H要求 |
| 耐腐蚀性 | 耐腐蚀性(盐酸实验)GB/T 1771-2007大于500小时 |
| 表面处理流程 | 除锈脱脂(辊式喷丸)→水洗→磷化→水洗→表调→水洗→烘干→喷粉→流平固化(加温到1800烘烤)→成品 |
# 1.8 天地导轨预埋件
1、天轨
天轨:10010010角钢,用螺栓连结于货架顶部的纵横梁上。
上下表面距离误差不超出±10mm/全长,与地轨平行度要求不得超出±5mm/全长;
轮压表面直线度水平弯曲极限偏差不超出±3mm/全长范围,表面光滑。

2、地轨
地轨采用38kg/m轨,用化学螺栓方式固定;
轮压表面垂直方向直线度误差轮距范围内不超出,表面光滑;
轮压表面水平方向直线度误差水平导向轮轮距长度内不超出±0.5mm,表面光滑。

# 1.9 设备钢平台
二层库前端的输送机安装在钢平台上。


# 1.10 平库拣选货架
| 流利式 拣选货架 | 共计:210个品规,单个品规存储量:5箱 单组货架外形尺寸:L4920mm×W3050mm×H2000mm 单组货架流利条滑道数量:4层×7列 (下面三层电子标签拣选用,顶层空箱回收) 单组货架拣选品规:21个,共10组货架 最大纸箱尺寸:400×600×440 |
| 搁板式 拣选货架 | 共计:784个品规,单个品规存储量:1箱 单组货架外形尺寸:L3055mm×W600mm×H2000mm 层数:4层 单组拣选品规:14个×4层,共14组 最大纸箱尺寸:400×600×440 |
| 整托盘拣选架 | 共计:20个品规,单个品规存储量:2托 地面摆放,采用铝形材框架 共20组,每组2托盘 |
| 斜插式周转箱 | 数量:350个 规格:W400mm×L600mm×H275~315mm 载重:25kg/箱,材质:PP(聚丙烯) |
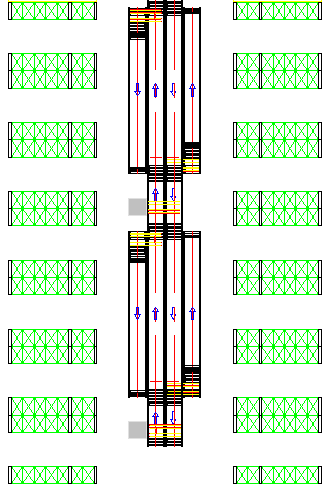
流利式货架布局
1组流利式货架平面布局
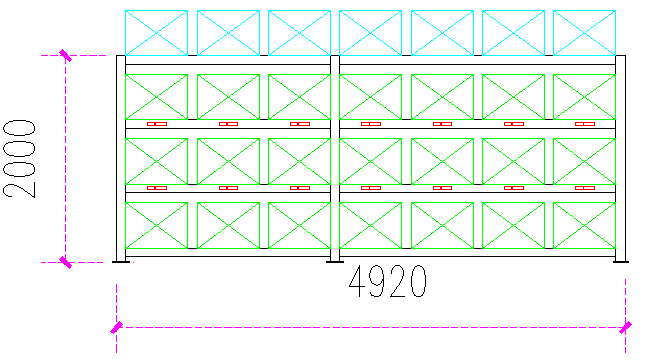
1组流利式货架立面布局
搁板式货架布局
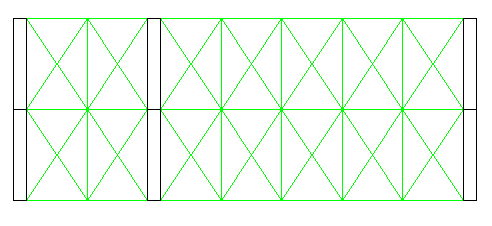
1组搁板式货架平面布局
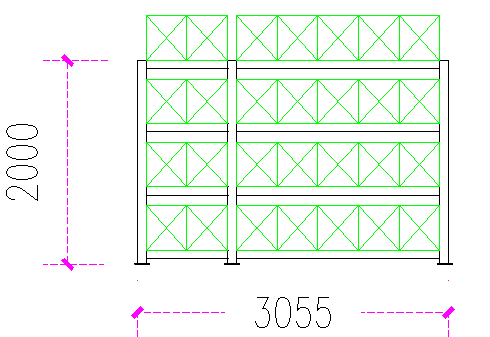
1组搁板式货架立面布局
整托盘拣选区布局
# 第二节 巷道堆垛机系统
# 2.1 设计参考标准
堆垛机国家及行业有关标准
(1)《有轨巷道式高层货架仓库设计规范》 (JB/T 9018-1999);
(2)《有轨巷道堆垛起重机技术条件》 (JB/T 7016-1993);
(3)《有轨巷道堆垛起重机安全规范》 (JB 5319.2-91);
(4)《巷道堆垛起重机型式与基本参数》 (JB/T 2960-1999);
(5)《起重机设计规范》 (GB 3811-2008);
(6)《有轨巷道堆垛起重机钢结构计算规范》 (DIN 15350-1992);
本所独立设计,自主研发的高性能有轨巷道堆垛机系统,具备货叉机构及行走轮箱的自主知识产权。具备独立设计、制造和售后服务能力。
# 2.2 主要技术参数
堆垛机的关键部件均采用国际技术领先产品,巷道堆垛机在高层货架的巷道内按 X、Y、Z 三个坐标方向运行,将位于巷道口入库台上的货物存入货格;或将货格内的货物取出运送到巷道口出库台上。
堆垛机设计与制造严格按照国家标准进行,并对结构强度和刚性进行精密地计算,以保证机构运行平稳、灵活、安全。堆垛机配备有安全运行机构,以杜绝偶发性事故。
| 序号 | 项目 | 性能指标 |
| 1 | 堆垛机形式 | 有轨式双立柱高性能巷道堆垛机 |
| 2 | 巷道宽度 | 1500mm(货架放货物后的净空间) |
| 3 | 行走轨道与导轨 | 38kg重轨,行走轨道为地面轨道,导轨为上轨道,主要起导向作用,化学螺栓固定 |
| 4 | 额定载荷 | 500Kg |
| 5 | 数量 | 4台 |
| 6 | 高度 | 20100mm |
| 7 | 货架底层 | 700mm |
| 8 | 货架顶层 | 2150mm |
| 9 | 提升机构 | 采用卷筒式起升机构,提升马达,圆股钢丝绳提升,钢丝绳强度安全系数不小于6; |
| 10 | 提升行程 | 17.25m |
| 11 | 货叉行程 | 1.35m |
| 12 | 载货尺寸 | 1200mm(长)×1000mm(宽)×1500mm(高)(含托盘) |
| 13 | 水平行走机构 | DEMAG行走车轮组;关键部位SKF轴承; SEW电机(功率:15KW),定位精度±5mm |
| 14 | 升降机构 | SEW电机(功率:18.5KW),定位精度±5mm |
| 15 | 伸叉机构 | MIAS货叉;SEW电机(功率:1.5KW),定位精度±3mm; |
| 16 | 伸叉精度 | (1)同步运行误差<±2mm; (2)运行重复回位精度在±5mm之内; (3)平面高低差<±2mm; |
| 17 | 通讯方式 | SIEMENS PROFINET,无线以太网通讯 |
| 18 | 供电方式 | 法勒滑触线,交流三相 380V 50Hz |
| 19 | 认址方式 | 水平定位:采用激光测距仪认址方式; 垂直定位:采用激光测距仪认址方式; 货叉定位:采用旋转编码器认址方式; |
| 20 | 各电机驱动方式 | 变频调速、交流同步 |
| 21 | 水平速度 | 0-160 m/min,闭环变频调速 |
| 升降速度 | 0-40m/min,闭环变频调速 | |
| 伸叉速度 | 0-40 m/min,闭环变频调速 | |
| 22 | 水平加 速 度 | 0.45m/sec2,闭环变频调速 |
| 升降加 速 度 | 0.5m/sec2,闭环变频调速 | |
| 货叉伸缩加 速 度 | 0.3m/0.6m/sec2(有货/无货) | |
| 23 | 控制系统 | 德国SIEMENS S7-300系列PLC控制器; 支持自动控制、手动控制、单机自动和联机自动四种控制方式 |
| 24 | 托盘识别 | 安装有SICK条码阅读器,确保库存100%准确 |
| 25 | 界面语言 | SIEMENS触摸屏,支持中文 |
| 26 | 货物尺寸检测 | 专用光电开关检测,适用于-20℃~70℃ |
| 27 | 供电电源 | 控制220V、动力380V |
| 28 | 噪音 | 低于75分贝/单台 |
# 2.3 堆垛机机械部分
堆垛机机械部分主要由金属结构、载货台、水平运行机构、起升机构、货叉伸缩机构、导轮装置、安全保护装置组成。

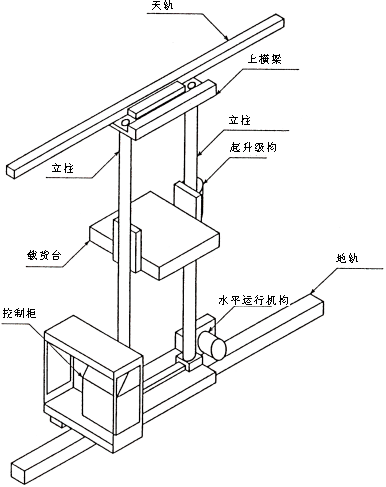
# 2.3.1 金属结构
堆垛机金属结构主要由上横梁、立柱、下横梁和控制柜支座组成。
立柱与上、下横梁通过法兰定位,用高强度螺栓连接,整个金属结构具有重量轻、抗扭、抗弯性性能好、刚度大、强度高等特点
| 上横梁 |  |
|---|---|
| 上横梁是由钢板或型钢焊接成箱形结构,载面性能好 | |
| 下横梁 |  |
| 下横梁是由钢板或型钢焊接成箱形结构,载面性能好。下横梁上两侧的运行轮轴孔在落地铣镗床一次装夹加工完成,确保了主、被动轮轴线的平行,从而提高了整机运行平稳性 | |
| 立柱 | 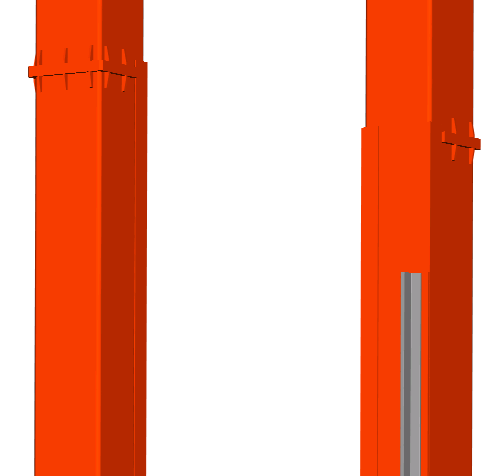 |
| 立柱为矩形断面梁,在矩形梁两侧焊接两条冷拉扁钢导轨,导轨表面冷作硬化处理,耐磨性好。在焊接中采用了具有特殊装置的自动焊接技术,有效克服了整体结构的变形 | |
| 控制柜支座 |  |
| 用于安装堆垛机控制柜,及便于工作人员手动操作堆垛机时站立。 |
# 2.3.2 载货台
载货台是一个通过动力牵引作上下垂直运动的一个部件,由垂直框架和水平框架焊接而成的一个U型结构,垂直框架用于安装起升导轮和一些安全保护装置。孔位精度要求高,因此垂直框架钢板采用激光数控切割,一次定位加工而成;水平框架采用无缝钢管制成,外型美观,完全能够满足载货的要求。

# 2.3.3 水平运行机构
水平运行机构是由动力驱动和主被动轮组组成,用于整个设备巷道方向的运行。选用了SEW电机直接驱动车轮。质量可靠,维护方便,噪音低。被动轮组采用了偏心结构用来调整整台设备的垂直度和受力变形的影响。


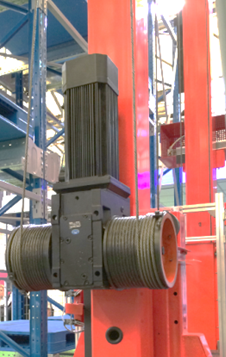
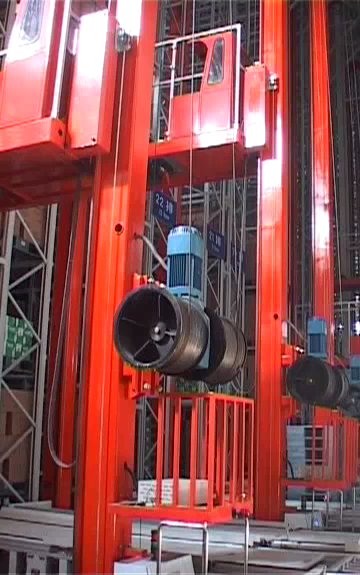
# 2.3.4 起升机构
起升机构是由动力驱动、卷筒、滑动组和钢丝绳组成,用于提升载货台作垂直运动。选用SEW电机直接驱动卷筒,钢丝绳带动载货台上下运动。定滑轮和动滑轮均采用工程尼龙车制而成,此种卷扬方式,噪音底,便于维修和发现隐患(能直观地发现钢丝绳的断丝)。
主要来实现载货台上升下降的动力源。1、要求检查钢丝绳的干涩情况,要适量给钢丝绳涂刷钙基脂润滑油和机油混合均匀的润滑油。2、检查电机电缆的固定情况,切莫与钢丝绳摩擦。3、检查钢丝绳的固定压块是否牢固。4、检查电机固定牢固是否。
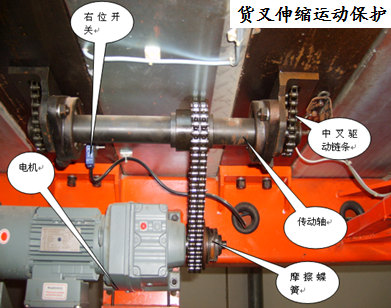
# 2.3.5 货叉伸缩机构
单伸货叉由上、中、下三叉组成,用于垂直于巷道方向的存取货物运动。下叉固定于载货台上,三叉之间通过链条传动作直线差动式伸缩,货叉由优质金属精制而成,成超薄形C型梁体,力学性能佳。货叉驱动也采用了SEW电机。


# 2.3.6 导轮装置
堆垛机共采用了上下水平导轮、起升导轮三组导轮装置,上下水平导轮分别安装在上下横梁上,用于导向堆垛机沿巷道方向作水平运动。起升导轮安装于载货台上,沿立柱导轨上下运动,导向载货台的垂直运动,同时通过导轮支撑荷重,并传递给金属结构。
堆垛机下导轮采用了复合走轮装置,运行更加平稳,同时由于采用球墨铸铁走轮,大大降低了运行噪音。其他导轮装置均由NUTD系列滚轮轴承和偏心轴组成,可以方便地调整间隙、拆装、注油等,同时NUTD系列滚轮轴承具有很高的承载能力,特别是对于受力的起升导轮性能极佳。
升降运行导轨和防坠制动导轨分开,制动不损伤运行导轨面。
- 水平运行导轮装置

- 起升导轮装置

- 天轨导向装置


# 2.4 安全保护装置
- 运行保护
该机构设有多重安全保护装置:
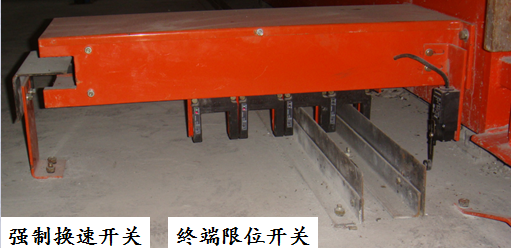
| 1 | 强迫降速 | 巷道两端设有强迫降速开关,堆垛机在该开关起作用时以低速水平运行; 若该开关损坏,堆垛机始终以低速运行 | 电气保护 |
|---|---|---|---|
| 2 | 终端限位 | 在轨道终端设有限位开关,该开关动作则水平电机停转,堆垛机紧急停止 | 电气保护 |
| 3 | 巷道终端车挡 | 在地轨的两端头设有车挡,保证堆垛机不冲出轨道 | 机械保护 |
| 4 | 缓冲器 | 堆垛机水平撞上车挡时,聚氨酯缓冲器能够吸收能量,保护设备 | 机械保护 |
| 5 | 清轨器 | 在堆垛机上设有清轨挡板,能清除轨道上的异物。 | 机械保护 |
| 6 | 安全钩 | 安全钩能使堆垛机在上部导轮脱离天轨时不至倾翻。 | 机械保护 |
- 起升保护
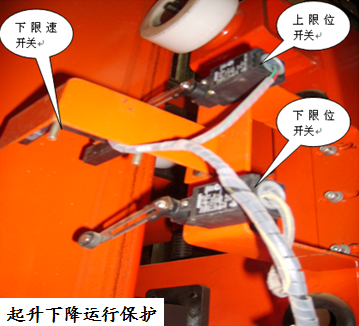
| 1 | 强迫降速 | 最高及最低层设有强迫降速开关,堆垛机在该开关起作用时以低速垂直运行; 若该开关损坏,堆垛机始终以低速垂直运行 | 电气保护 |
|---|---|---|---|
| 2 | 端层识别 | 当载货台处于最低层低位时,控制系统禁止下降操作; 当载货台处于最高层高位时,控制系统禁止上升操作 | 电气保护 |
| 3 | 终端限位 | 堆垛机立柱导轨的极限位置设有限位开关,载货台到达极限位置则垂直电机停转,紧急停止 | 电气保护 |
| 4 | 缓冲器 | 载货台下落撞到下横梁时,缓冲器能够吸收能量,保护设备 | 机械保护 |
| 5 | 过载保护 | 当载货台承受载荷大于限定值时,系统禁止载货台上升 | 电气保护 |
| 6 | 松绳保护 | 当钢丝绳失去张紧力时,系统禁止载货台下降 | 电气保护 |
| 7 | 限速装置 | 当堆垛机的载货台由于起升电机减速机断轴等原因下坠,超过设定的下降速度时,限速装置能够使垂直电机停转。到达更高速度后机械装置卡死钢丝绳,保护设备安全 | 电气/机械保护 |
| 8 | 断绳防坠装置 | 当堆垛机的载货台由于钢丝绳或链条断裂而自由下坠,限速装置无法起作用时,夹紧装置能够将载货台抱死在立柱起升导轨上 | 机械保护 |
- 载货台与货叉机构保护
| 1 | 货位有货检测 | 载货台设有货位有货检测开关,避免双重入库,当发现待入货位有货时,送入其他空货位并报警。 | 电气保护 |
|---|---|---|---|
| 2 | 交叉联锁 | 载货台的货叉设有中位及伸叉到位探测开关,非中位且非伸叉到位状态时,堆垛机禁止水平或垂直运行; 堆垛机水平或垂直运行时,禁止货叉动作 | 电气保护 |
| 3 | 货叉伸缩力矩限制保护 | 当伸叉阻力超过设定值时,能够避免设备损坏 | 机械保护 |
- 安全保护措施:具有完善的安全保护措施
(1)运行轨道两端设机械车挡;
(2)堆垛机两端设缓冲撞头;
(3)通电作业警示灯;
(4)堆垛机行走及升降行程两端均设强迫换速和强迫停止开关;
(5)PLC手动,可确保手动操作的平稳性,有利于保护托盘上的货物;
(6)“双重入库”和“空取货”探测及报警;
(7)起升钢丝绳松绳或过载电气保护装置;
(8)货叉伸缩自动换速及伸缩超时保护;
(9)货叉行程两端机械挡块及微升降保护;
(10)载货台上设有货物及货叉超差检测及报警装置;
(11)手动(半自动)/单机自动/联机自动只能选择其中一种方式;
(12)单机自动设定不妥(超范围)保护;
(13)有以下情况之一者,水平及升降动作将被锁定:
·货叉检测不在中位;
·货物尺寸超差;
·货叉正在动作;
·垂直升降的安全保护系统被启动;
·载货台超过最高极限,启动了紧急极限制动开关断电停车;
·堆垛机行走到巷道端部触动极限开关;
·堆垛机紧急制动被启动;
(14)有以下情况之一者,货叉伸缩动作将被锁定;
·堆垛机行走或升降运行时;
·堆垛机在列或层的方向上停位不准;
·堆垛机紧急制动被启动;
(15)所有电机过流、过热保护及正反向互锁;
(16)接地(或接零)保护;
(17)堆垛机行走或升降启动后,在指定的时间内,如果计数值保持在启动前的数值不变,将给出作业未执行报警:
·PLC命令已下,电机没通电;
·制动器损坏或粘连打不开;
(18)电控系统须设有声控报警装置,报警的同时,在堆垛机显示器及监控计算机中显示故障编号,以便于维修人员检查和维修;
(19)防坠落安全保护。
(20)其外围设备具有围栏及安全门锁,安全门与堆垛机互锁。




# 2.5 堆垛机操作
1)自动方式
在此方式下,堆垛机无须人工操作,可自动完成上位机下发的各种作业,同时向上位机返回状态信息、故障信息、统计信息,并在堆垛机控制柜的触摸屏上可以显示作业、状态、故障等信息。
2)监控手动方式
其操作方法和效果与手动相同,由于监控机操作时是遥控操作,出于安全性考虑,水平和垂直运行均只有低速模式。本方式可自动找到停准位置。
3)手动方式
在此方式下,堆垛机根据人工由手动操作面板上的按钮,单步执行各种动作。本方式可自动找到停准位置,并在堆垛机控制柜的触摸屏上可以显示层列数值、托盘条码、故障等信息。
4)维修手动方式
用堆垛机控制柜上的触摸屏进入此方式。此方式下,堆垛机可以低速开至水平、垂直的任何位置,货叉可以伸收到任何位置。本方式不能自动找到停准位置。(检查堆垛机开关状态,对堆垛机进行维护维修时,请务必使用此状态)
5)示教方式
堆垛机下降到货架一层低位(载货台上无货),后退到最后一列停准,用堆垛机控制柜上的触摸屏进入此方式,水平、垂直低速走到最前端、最上端,到达位置停准后退出示教模式且未报示教失败,示教即成功完成。示教方式是堆垛机的自我学习过程,会自动测量出水平和垂直方向所有有用的数据,在自动运行时用以自我检测,同时统计出操作人员关心的数据上传给监控系统。
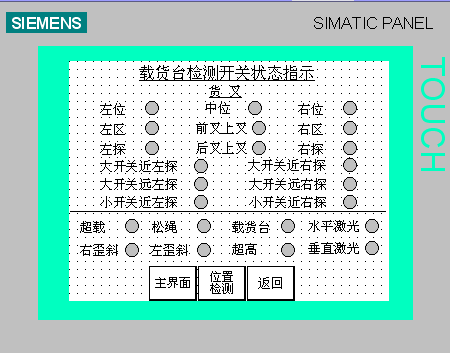
6)触摸屏操作
半自动操作是指操作人员在堆垛机上,通过堆垛机控制柜上的触摸屏对堆垛机下发作业,同时得到堆垛机返回的信息以便人工记录。下面解释一下触摸屏的具体使用方法:
图6-1为堆垛机控制柜上触摸屏启动后的首页画面,当前托盘号显示了当前载货台上托盘的标识(堆垛机取货后读到的条码,“条码触发”按钮可以手动重新读取),用于计算机管理系统记录。货叉位置显示货叉的左、中、右三个位置,指示灯深色表示货叉处于此位置。垂直位置表示堆垛机载货台处于某层的高、低位置,高位是放货位置,低位是取货位置。水平位置表示堆垛机是否在货位处停准,停准则指示灯深色,反之为浅色。通讯状态为堆垛机与输送设备的通讯是否连通(连通显示“通讯正常”,中断显示“通讯中断”)

状态信息显示了堆垛机:带载指示灯深色表示载货台上有货,反之无货;高货指示灯深色表示载货台上的货物为高货物,反之表示矮货物;空闲指示灯深色表示堆垛机目前没有自动作业,反之表示有作业正在进行中;故障指示灯深色表示堆垛机目前有故障,反之表示运行一切正常(具体故障可以查询故障显示列表);手自动两个指示灯哪个深色,就表示堆垛机处于哪种模式;倒计时表示堆垛机若干秒后进入指定的状态(自动、手动)。
层列位置显示了堆垛机当前所处的位置,以货架货位定义的位置;运行速度表示当前堆垛机各方向运动的即时速度,单位是:米/分钟。页面选择按钮可以点击进入其它页面,用以查看更多相关信息、进行更多操作。(作业步骤的意义见7.2)
人工条码输入用于堆垛机自动入库,如果入库托盘条码始终盲码而不能入库,可以人工输入一个条码,按确认键后堆垛机会接受人工条码将此盘货物继续入库。
点击主页面的“报警查看”按钮则进入图5-3-2画面,本页是消息列表,能够同时列表显示多条信息,包括堆垛机出现的各种故障报警的名称(例如:前端开关故障、前限速开关故障)以及堆垛机刚刚进行的作业异常结束的原因(例如:取货无箱、存货占位)。故障确认请按堆垛机操作面板的绿色“功能”按钮。点击右下角的返回按钮可以回到主界面。
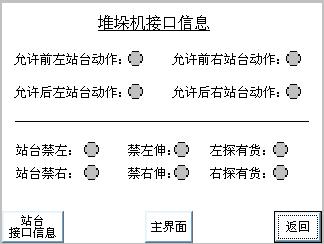
点击主页面的“接口信息”按钮则进入图6-3画面,本页是接口信息,显示了堆垛机和站台相互允许动作的情况。例如:站台有货则不允许堆垛机继续往站台上放货;堆垛机正在从站台取货、或者正在往站台上放货,则此时站台的输送设备不允许动作。
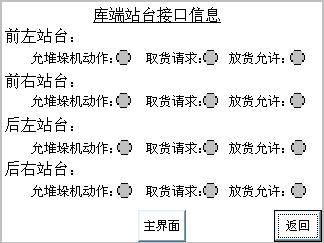
图6-4
返回按钮
站台信息显示
图6-4
返回按钮
站台信息显示
点击6-3页面的“站台接口信息”按钮则进入图6-4画面,本页是站台接口信息,显示了站台对堆垛机的互允许动作的情况。例如:一个站台有取货请求,堆垛机将到此站台取货;一个站台有放货允许,则堆垛机出库时才能把货放到上面;当某个站台没有堆垛机动作允许时,堆垛机在此站台位置不能有任何货叉动作(即放货、取货)。
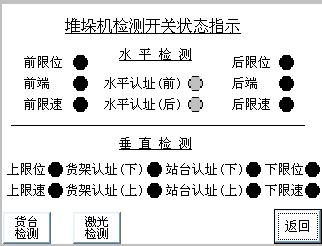
图6-5
返回按钮
水平相关输入点状态
垂直相关输入点状态
图6-5
返回按钮
水平相关输入点状态
垂直相关输入点状态
主界面里点击“垛机检测”按钮,进入页面如图6-5所示,此页面显示了堆垛机水平和垂直相关检测开关的信号状态,浅灰色表示此检测点处于低电平0,深灰色表示此检测点处于高电平1;信号为深色表示此检测开关处于被遮挡状态,即正在起作用。右下角的返回按钮点击可以回到主界面。
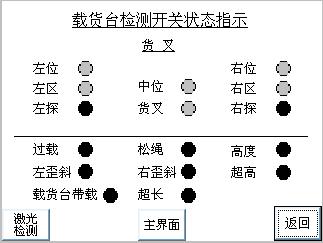
页面6-5里点击“货台检测”按钮,进入页面如图6-6所示,
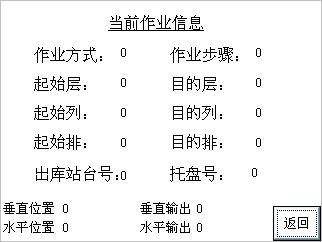
图6-7
返回按钮
作业详细信息
检测数据
图6-7
返回按钮
作业详细信息
检测数据
主界面里点击“作业信息”按钮,进入页面如图6-7所示,显示了堆垛机当前的作业信息,完整的显示了堆垛机的自动状态。右下角的返回按钮点击可以回到主界面。
作业方式:“1”表示入库,“2”表示出库,“5”表示入库修正,“8”表示到指定地址,“10”表示货架盘库,“13”表示货物盘库,“16”表示指定出库。
起始层、列、排:堆垛机载货台为空载时,去取货的地址。
目的层、列、排:堆垛机载货台为带载时,去存货的地址。
水平输入:PLC给水平变频器的模拟量值,关系变频器输出多少赫兹。
垂直输入:PLC给垂直变频器的模拟量值,关系变频器输出多少赫兹。
水平编码:水平编码器的当前脉冲数,即从原点的水平行走距离。
垂直编码:垂直编码器的当前脉冲数,即从原点的垂直行走距离。

图6-8
作业方式代码
作业步骤代码
口令输入框
工作方式选择按钮
工作方式指示灯
速度参数设定
功能按钮
图6-8
作业方式代码
作业步骤代码
口令输入框
工作方式选择按钮
工作方式指示灯
速度参数设定
功能按钮
点击主界面的“工作方式”按钮,进入图6-8所示页面
盲码必须处理选中时,堆垛机入库时不能是盲码,如果无法读出正确条码则需要人工输入条码,输入在6-1所示主页面里。
第一排“工作方式选择”按钮都可以直接点击,无需口令登录。
堆垛机如果处于手动、监控手动状态,则“手动”按钮上方的指示灯亮起;堆垛机手自动转换拨扭拨到自动,则10秒钟后“自动”指示灯亮起,此时点击“半自动”按钮,半自动指示灯亮起;需要从半自动转回自动模式时,点击“自动”按钮,自动指示灯亮起即可。
# 第三节 托盘输送系统
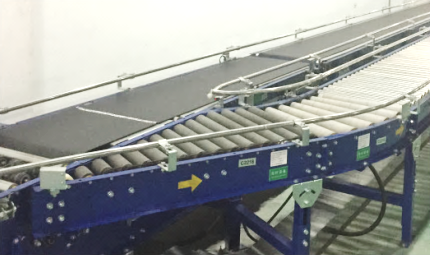
# 3.1 输送系统特点
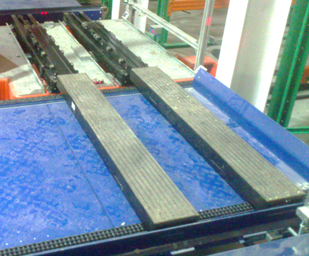
(1)结构轻便,设计合理,托盘输送系统主要由链式输送机、辊式输送机、辊式移载机、穿梭车、提升机、拆盘机、外型检测装置等组成;
(2)性能可靠、美观大方、并且便于安装和使用期间的维护保养,具备必要的安全措施,电气元件质量优良、运行噪音满足环境要求;
(3)入库托盘总重不超过500kg,货物码放到托盘上时不超过托盘边缘。外形尺寸检测能够切实检测到异常的情况,并有效报警。不符合要求的托盘直接退回;
(4)出入库输送系统可满载启动,设备运行平稳可靠、无异响、无脉冲式跳动。整机启、停平稳、无打滑、撞击现象;
(5)输送机控制采用西门子PLC方式,采用分式控制方式,输送线每一段每一驱动单元均采用变频调速控制;
(6)输送系统设备有完善的检测信号,检测开关质量优良。设备的电气元件采用国际知名品牌的高品质产品;
(7)在出入库前配有相应的操作台,在操作台上配有SIEMENS触摸屏。在上位机故障的情况下,可以通过触摸屏对设备进行调度,实现仓库设备的自动化运行。同时可以通过触摸屏实时查看仓库中各个设备的运行状态和信息报警等功能;
(8)输送机控制方式具备自动、手动和联机自动方式;
(9)系统安全措施到位,两侧具有保护导向装置,完善的连锁保护装置,控制柜和输送系统的必要位置设置急停开关;电机运行过载时,设备停止运行并报警。
| 托盘输送机 | |
|---|---|
| 项目 | 投标技术参数 |
| 涂装标准 | 涂料采用热固环氧树脂(粉状),涂层厚度60μm,其质量均按GB/T6807-2001标准 |
| 表面处理 | 酸洗、磷化、喷塑、链条双排链式,辊筒碳钢镀锌; |
| 额定载荷 | 500kg |
| 货物规格 | 1200mm(长)×1000mm(宽)×1500mm(高)(含托盘) |
| 输送速度 | 输送机输送速度:0-16m/min(变频调速); 提升机提升速度:35m/min(变频调速),SEW电机驱动; |
| 速度控制方式 | 变频器控制 |
| 驱动方式 | SEW电机驱动,0.75kw |
| 通讯方式 | 工业以太网 |
| 供电方式 | 380V交流电 |
| 操作方式 | 自动、手动、联机自动控制 |
| 安全措施 | 有连锁程序、导向装置保护、端部机械死挡 |
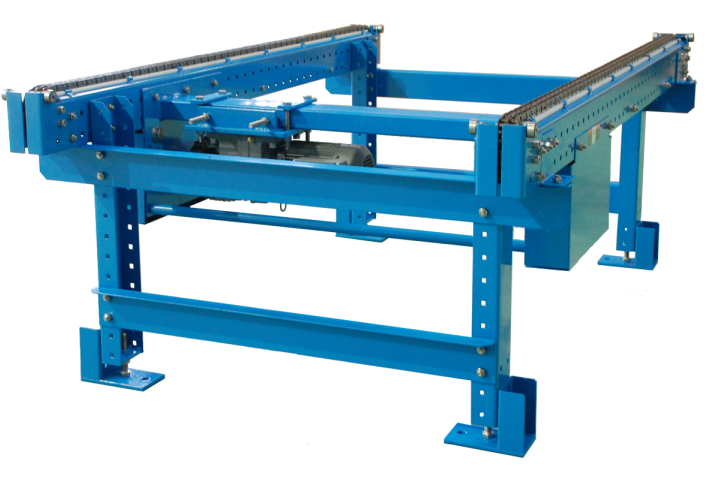
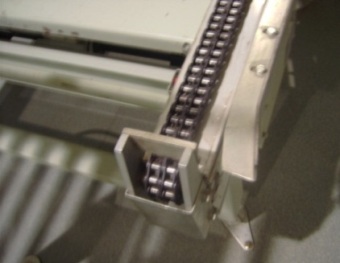
# 3.2 链式输送机
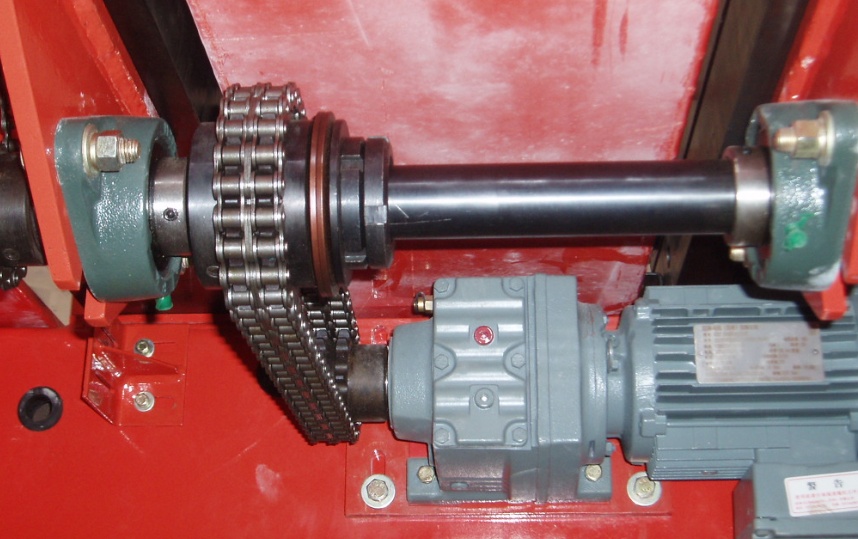
链式输送机是以链条作为牵引和承载体输送物料,链条一般采用直板套筒滚子输送链,也可采用其它各种特种链条。链式输送机输送能力大,可承载较大的负荷,具有结构简单、载荷大、效率高、运行平稳、维修方便等优点,是托盘出入库系统组成中的重要机型之一。链式输送机以两列或三列链条直接承载规则形状的物体(多用于托盘),根据链条的规格,可输送几公斤到几吨重的货物。
本产品主要由机架、支腿、驱动装置、输送链条、拉杆、护栏等组成。
使用优质链条,高强耐磨,使用可靠,导轨加可以更换耐磨导轨条。输送链条采用特制双排链条传输,导向两侧采用不等边角钢,根据项目要求布置,护栏做成整体式,外翻(3米以上,中间允许拼接)。驱动装置采用SEW电机减速机链条驱动。包括一个减速电机、驱动轴组件、传动链轮组和电机座。电机通过链轮带动驱动轴转动。驱动轴带动输送机一端固定式改向链轮,它驱动轴两端链轮传动双排输送链条。电机轴端链轮加紧定螺钉及轴端挡板。传动部位加防护罩壳。链条张紧装置位于驱动装置上。整体支撑框架,结构合理,色彩协调,外表美观。为保证输送平稳,相邻两段链式输送机的连接部位采用链条搭接形式。表面烤漆处理,支腿、护栏、上支撑、端头板等零件经钢丝刷、砂纸等除锈,酸洗去油脂,磷化后表面静电喷涂环氧树脂粉末并烘烤,树脂厚度在60μm -90μm之间。


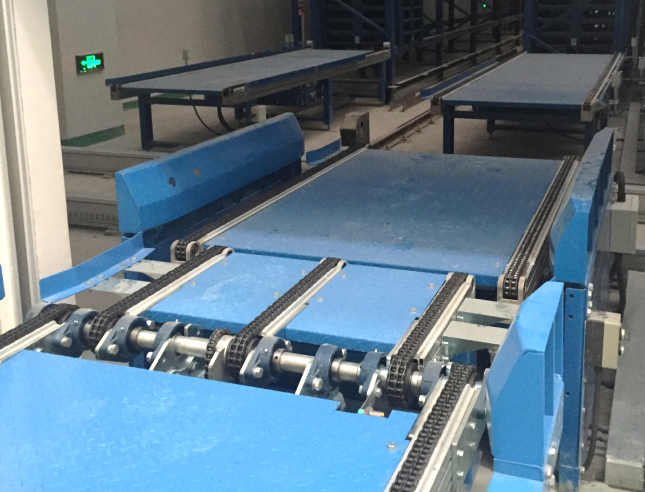
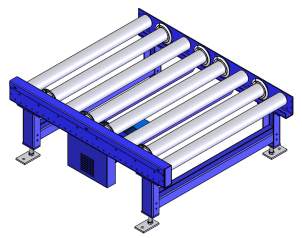
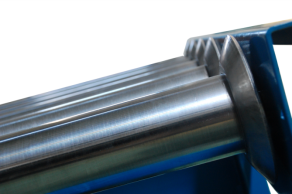
# 3.3 辊式输送机
辊式输送机是配合堆垛机对托盘货物入出自动化立体仓库的主要构成设备之一 ,以特制有重型滚筒作为承载体输送物料,可实现托盘搬运过程中直行,由输送线中的垂直顶升移载机垂直转向搬运等功能。一般与链式输送机配合适应不同底面状态托盘的输送。辊式输送机是依靠环链传递扭矩,驱动辊筒来连续地来输送物料,具有噪音低、输送平稳、承载大、性能优异、外型美观等优点。以马达驱动链条牵引驱动滚筒,驱动滚筒采用级连式传动其它滚筒达到输送物料的物料搬运机械。
辊式输送机主要由机架辊道组件、支腿、驱动架、链条、防护罩等经连接件组合而成。
机架辊筒组件由机架和辊筒组成,辊筒轴和机架采用螺栓连接,辊筒轴的两端有内螺纹孔,通过辊筒轴与两片机架的连接增强了机架的刚性。支腿数量取决于辊式输送机的长度和负载重量。
辊筒传动是由电机链轮通过链条传动其上的2根辊筒,各辊筒按一定间距排列,每根辊筒上有一个双排链轮,再由这2根辊筒一环套一环依次传动其余辊筒,各驱动辊筒的连续运行带动单元载向前运行。
电机在驱动架上居中,电机链条通过驱动架上的螺栓进行张紧。根据输送系统布局和空间大小,放置在内侧或外侧。
本产品使用优质辊筒,高强耐磨,使用可靠。驱动链条采用国家标准节距精密滚子链条传输;辊筒直径76mm无缝钢管,厚度0.03~0.05mm。驱动装置采用SEW电机减速机链条驱动。驱动输出部分及张紧机构安装有安全防护罩。整体支撑框架,结构合理,色彩协调,外表美观。


# 3.4 辊式移载机
辊式顶升移载机是输送线中以垂直转运方式改变物品的输送方向的设备。因物品相对于输送方向的位置在转运前后改变了90°,因此物品转运后宽度发生变化。输送机线路输送宽度也随之变化。
辊式顶升移载机主要由顶升机构、移载机构、检测装置、减速机等部件连接组成。
顶升机构:带高度调节脚的焊接式底框,底座式减速电机置于底框中间,两套传动轴分别由两侧轴承座和底框连接,两轴通过传动链条分别和电机连接。每根轴和两端装有滚针随动轴承曲臂(凸轮),由这四个连动曲臂组成顶升结构,确保升降框架四角受力均匀,升降平稳。
移载机构:采用辊式输送机,具体结构同前述。
检测:升降两个位置光电检测,货物到位光电检测。
SEW带制动减速电机3相380V。
辊式移载机采用顶升机构采用电机顶升装置,能适应更大的升降距离的要求,支架上电机减速机带动辊筒上面托盘运行。滚筒直径76mm无缝钢管。驱动输出部分及张紧机构安装有安全防护罩。升降台有辊子输送和链条升降两个机构组成,分别由两个SEW电机驱动,实现辊子的旋转和链条的升降。辊子输送同辊式输送机,升降机构采用电机减速机带动曲柄连杆机构实现链条的升降动作。
每个电机安装在预置的底座上,与输送机的钢结构形成整体并被固定在钢结构上。在需要的地方设电磁制动器。
电机减速机通过链轮带动相互套链的辊子(直径为76mm)按照预先设计的速度旋转,从而带动辊子上托盘货物的运动达到输送托盘货物的目的。
控制系统依赖升降台上的位置传感器判断输送机上托盘货物和升降位置的高低位的状态,通过电机减速机自动实现托盘货物在该输送机上的输入和输出,以及升降台的升降对准。




# 3.5 穿梭车
穿梭车输送系统由穿梭车单车、穿梭车控制系统、穿梭车供电滑触线系统、穿梭车运行双轨道系统、其他辅助器材组成。
穿梭车上安装有确保安全运行的检测及联锁装置,如:
货物超边检测光电开关,货物超边时,穿梭车行走立即停止,同时报警。
行走限位开关,往复式穿梭车在运行端头处设置极限位开关,当行走定位失灵引起穿梭车行走到极限位时,发出报警信号并紧急停车。此外,在超出行走限位开关位置外设置有抗冲击性能良好的缓冲块,迫使穿梭车停止运行,作用于缓冲块上的力是按穿梭车满载和高速行走的条件下计算的。
防撞停止开关,在同一轨道内有两台以上的穿梭车同时运行时,设置防撞停止开关,当防撞停止开关动作时,穿梭车停止运行。
防撞减速开关,在同一轨道内有两台以上的穿梭车同时运行时,设置防撞减速开关,当防撞减速开关动作时,穿梭车减速运行,以便于保持两车之间的安全距离。
具有输送与行走动作互锁。
电机运行具有过载报警。
穿梭车上装有手动急停按钮,在紧急情况下可以切断穿梭车总电源。
穿梭车上配有声光报警装置,在运行机构启动前将发出声光提示。
PLC故障报警。
具有整理纠偏性能。
| 穿梭车 | |
|---|---|
| 项 目 | 投标技术参数 |
| 额定车载质量(Kg) | 500kg |
| 载货尺寸 | 1200mm(长)×1000mm(宽)×1500mm(高) |
| 移载方式 | 链式 |
| 移载速度(m/sec) | 16m/min(变频调速) |
| 行走速度 | 120 m/min |
| 行走加速度 | 0.5m/sec2 |
| 行走定位精度 | 士5mm |
| 移载定位方式 | 光电开关定位 |
| 行走电机(kw) | SEW电机(功率:5.5kw) |
| 移载电机(kw) | SEW电机(功率:0.75kw) |
| 控制系统 | 西门子PLC控制 |
| 驱动方式 | SEW电机驱动 |
| 控制方式 | 手动/单机自动/联机全自动 |
| 认址方式 | 条码带 |
| 通讯方式 | 无线以太网 |
| 供电方式 | 法勒滑触线、采用三相五线制 |
| 轨道 | 铝合金专用轨道 |
| 电源规格 | 380/220V三相五线制 |




# 3.6 提升机
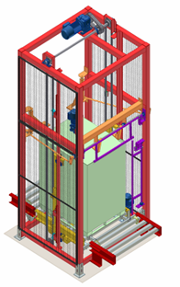

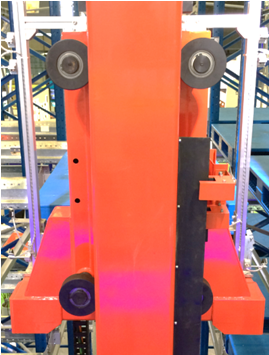
往复式升降机是利用升降平台的上下往复运动来实现物料的垂直输送。升降平台上可装上不同种类的输送设备,并与出入口输送设备相配合,使输送过程实现完全自动化。升降平台的上下行程均可输送物料,在升降平台的一个循环过程中可使物料同时双方向流动。提升行程范围大,输送量随着行程的增加而减少。
往复式升降机主要由机体、升降货台、输送机、安全防护装置、外购件等部件构成。
往复升降机采用四立柱框架,顶部横梁连接,驱动装置于升降机顶部,外围用钢丝网防护。
升降货台:升降平台靠提升链条与主机架连接,并导向滚轮和导轨导向,提升链条的另一端与平衡配重块连接。
升降平台上可安装辊式输送机或链式输送机。
往复式升降机形式多样、布置灵活,物料可以从各个方向上进出提升机,便于生产设备布局;承载范围大,可设置各种安全装置,提高设备运行的安全性,适用于各个行业的垂直输送。
提升机上安装有确保安全运行的检测及联锁装置,如:
货物超边检测光电开关,货物超边时,提升机升降立即停止,同时报警。
货物超高,超宽检测光电开关,只有高度和宽度合格的货物才能进入载货台,当货物超高或超宽时,输送停止,同时系统报警。
升降限位开关,当提升机升降定位失灵,提升机升降达到最高或最低限时,发出报警信号并紧急停车。此外,在超出升降限位开关位置外设置有抗冲击性能良好的缓冲块,迫使载货台停止运行。
升降减速开关,当提升机升降减速开关触发时,提升机减速运行。
超速开关,当提升机升降超速时,系统报警,并紧急停车,载货台制动器卡在立柱上,避免载货台跌落。
输送与升降联锁。
电机运行过载报警。
提升机上装有手动急停按钮,在紧急情况下可以切断提升机总电源。
提升机上配有声光报警装置,在运行机构启动前将发出声光提示。
PLC故障报警。
其它必备联锁和安全措施。
| 提升机 | |
|---|---|
| 项目 | 投标技术参数 |
| 涂装标准 | 涂料采用热固环氧树脂(粉状),涂层厚度60μm,其质量均按GB/T6807-2001标准。 |
| 表面处理 | 酸洗、磷化、喷塑 |
| 输送货物规格 | 1200mm(长)×1000mm(宽)×1500mm(高) |
| 速度控制方式 | 变频器控制 |
| 驱动方式 | SEW电机驱动 |
| 输送质量 | 500kg |
| 升降速度 | 35m/min |
| 输送速度(m/min) | 16m/min(变频调速) |
| 货物定位方式 | 接近开关、光电开关定位,定位精度±5mm |
| 装机容量(kw) | 5.5kw |
| 通讯方式 | 工业以太网 |
| 供电方式 | 380V交流电 |
| 操作方式 | 自动、手动、联机自动控制 |
| 安全措施 | 有连锁程序、导向装置保护、端部机械死挡 |
# 3.7 拆盘机


工作原理:首个托盘进入拆码盘机到位后,顶升台将托盘顶至最高位,两侧拨叉伸出,顶升台下降,将托盘放至拨叉上。待下一托盘进入拆码盘机并定位后,顶升台将托盘连同拨叉上托盘顶起一定距离(顶升台上升至中间位),两侧拨叉收回,顶升台再上升至最高位,两侧拨叉伸出,顶升台下降至最低位,将托盘放至拨叉上,完成第二个托盘的码盘。按此形式将托盘码至要求数量后,顶升台下降至最低位,将托盘组放到输送机上,由输送机将托盘组输送至要求地点,完成整个码盘的动作。拆盘机原理和码盘机动作顺序相反。
拆码部分结构:框架部分使用方管型材焊接,通过螺栓连接成整体框架。框架支腿与机架螺栓连接,M20螺杆调节杯脚与地面固定,整体高度调节±25mm。框架两侧装有拨叉机构,拨叉机构通过电机端部安装的偏心轮进行转动,实现拨叉叉板在水平方向上的位置变化。
升降部分结构:升降部分底座使用焊接式框架,电机安装在底座上。底座上装有的M20调节杯脚与地面固定,整体高度调节±25mm。升降部分的上台面通过剪刀叉机构或者曲臂机构完成升降运行。
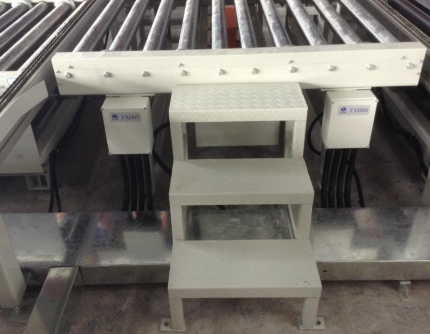
# 3.8 外型检测装置
尺寸检测装置是以存储单元尺寸的长、宽、高为基础,根据允许的误差进行设定。然后对入库的存储单元长、宽、高三个方向的尺寸进行红外光电扫描,判断是否超过该设定,若没有超过该设定则视为尺寸合格,允许入库。若超过该设定,在系统里则视为“尺寸不合格”托盘,需要退出整理,并向系统报告超差情况(如高度或长度方向等)。


该尺寸检测装置由支架和开关组成。开关安装在支架上,并通过信号线与输送机系统PLC相连。PLC根据该处输送设备上的检测装置判断某存储单元到达该输送设备上后,向尺寸检测装置发出检测信号,尺寸检测装置将检测结果返回给PLC,由PLC进行判断。
| 尺寸检测装置 | |
|---|---|
| 材质 | 铝合金机架,光电开关检测 |
| 允许超过的误差范围 | +10 ~ +15mm |
| 控制方式 | PLC自动控制进行检测并返回信号 |
| 通讯方式 | 工业以太网 |
| 供电方式 | 380V交流电 |
| 操作方式 | 手动、联机自动控制 |
# 3.9 LED显示屏
- 概述
LED显示屏是集光电子技术、微电子技术、计算机技术、信息处理技术于一体的高科技产品;可用来显示各种文字、图形、数据、表格等信息。同步显示计算机二维、三维动画及电视画面;并有播放动画、VCD、DVD等功能。它色彩丰富、显示方式多样化、亮度高、寿命长,是信息传播设施跨时代的产品,为目前国际上广泛使用的显示系统。广泛应用于政府机关、商业广告、高速公路、体育场所、信息传播、新闻发布、证券交易、邮政电讯、工商税务等领域。
- LED显示系统构成
显示屏
控制系统
配电箱及运行控制设备
控制计算机
外观及装饰
系统软件
其它配套设备
线缆辅材
- 适应环境要求
工作环境温度:-40℃—+80℃的环境下连续正常工作;
工作环境湿度:小于95%环境下,内部不结露、且能正常工作;
屏幕具有防潮、防盐雾、防腐蚀、防霉变等防护功能;
屏幕具有防尘、防工业干扰、抗震、阻燃等防护功能;
屏幕具有防电磁干扰、防雷击等防护功能;
电器运行方面具有过流、短路、断路、过压、欠压等防护措施。
# 3.10 其他附件及防护设施
为保证输送设备稳定可靠地实现输送功能、准确停位功能、设备和物料安全等功能,在输送设备上,还必须根据工艺要求配备一些附件。
(1)输送导向装置
用于保证物料沿着设定方向输送,防止物料偏移而影响转角输送和堆垛机存取物料准确。链式输送机采用折弯板式,辊道输送机和升降输送机采用固定挡盘。

(2)固定挡料装置
用于物料停位准确,或防止物料意外掉落。参考型式见下图。
(3)叉车限位装置
用于防止叉车放料时意外冲击输送设备。

(4)防护设施
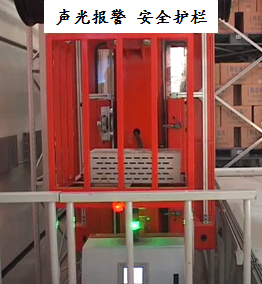
整体系统设计时还考虑在堆垛机运行通道的前后通道口设相应安全护栏及安全门系统,在相应的维修工位设相应的安全门系统,所有的安全门系统与控制系统对接,有互锁功能,安全门未关好设备无法运行。整系统运行时安全性良好,在各部位均有国家标准所规定的安全标志符号或中文标志提示,所有安全说明书及安全标志采用国家统一符号标识,并贴在醒目位置。




# 第四节 箱式输送系统
# 4.1 楔形带滚筒输送机




(1)用途及工作原理
用途:楔形带辊筒输送机适用于各种箱式货物的输送。
工作原理:电辊筒或电机布置在辊筒中间,由多楔带将相邻辊筒(包括电辊筒)两两相连,当电辊筒运行时,通过多楔带带动相连辊筒运行,实现输送功能。
(2)技术参数
速度:15~60 m/min(控制卡自带10级调速)
承载:50 kg/m
滚筒中心距:100m/120mm
机架采用碳钢机架
支腿采用:碳钢喷涂,输送高度2.2米以上部分采用吊装方式
采用标准滚筒,辊筒直径Φ501.5,筒体不锈钢,轴碳钢
结构简单,电动滚筒免维护
节电60%以上,低噪音
通过自带控制卡,可实现调速、正反转、过载保护、通讯等功能
电动滚筒品牌:瑞士INTERROLL
# 4.2 无动力滚筒输送机

噪音低
结构简单
免日常维护
承载:50 kg/m
滚筒中心距:100m/120mm
机架采用碳钢机架
支腿采用:碳钢喷涂,输送高度2.2米以上部分采用吊装方式
# 4.3 楔形带滚筒转弯机




(1)用途及工作原理
用途:弯道辊筒输送机适用于各种箱式货物的转向输送。
工作原理:电机带动链条,链条带动锥辊(辊筒端部链轮和链条啮合)运行,实现转向输送功能。
(2)技术参数
速度:15~60 m/min(控制卡自带10级调速)
承载:50 kg/m
滚筒中心距:100m/120mm
机架采用碳钢机架
支腿采用:碳钢喷涂,输送高度2.2米以上部分采用吊装方式
结构简单,电动滚筒免维护
节电60%以上,低噪音
通过自带控制卡,可实现调速、正反转、过载保护、通讯等功能
电动滚筒品牌: 瑞士“INTERROLL”
# 4.4 分/合流滚筒输送机

速度:36m/min
承载:50 kg/m
滚筒中心距:100m/120mm
机架采用碳钢机架
支腿采用:碳钢喷涂,输送高度2.2米以上部分采用吊装方式
结构简单,电动滚筒免维护
通过自带控制卡,可实现调速、过载保护、通讯等功能
# 4.5 皮带输送机



(1)用途及工作原理
用途:皮带输送机适用于各种箱式货物的输送。
工作原理:电机通过链轮组传动,带动皮带驱动辊,带动皮带运动,实现输送功能。
(2)技术参数
速度:40 m/min
承载:50 kg/m
机架采用碳钢机架
支腿采用:碳钢喷涂,输送高度2.2米以上部分采用吊装方式
皮带品牌:西格林皮带
功率:370W、550W、750W、1100W(根据长度)
减速电机:SEW(德国)其中有一些电机需要带刹车
# 4.6 摆动轮分拣机构
分拣效率:2500~3000 UPH
输送物特质:塑料箱、纸箱
重量:低于50 kg
摆动气缸及电磁阀:日本“SMC”
驱动减速电机:0.55 kw 德国SEW
机架采用碳钢机架
# 4.7 窄带顶升移载机构
分拣效率:2000 UPH
输送物特质:塑料箱、纸箱
重量:低于50 kg
窄带材料:皮带
驱动减速电机:0.55 kw 德国SEW
机架采用碳钢机架

# 4.7 条码识读系统
条码识别器由扫描头和总线模块组成,扫描头完成条码信息获取功能,通过总线模块连接到总线上从而与主控制器进行通信。固定式条码识别器用于扫描托盘上粘贴的条码及包装产品上张贴的二维码,以完成信息识读和信息校验任务。
所有输送线上的条码扫描器配单独的安装支架,单独安装,不安装在输送机上,支架为铝型材。

扫描系统:周转箱侧扫,原包装箱顶扫。
扫描合格率:原包装箱顶扫,在条码符合相关国家/行业规定的前提下,条形码读取识别率为>99%;周转箱侧扫,在条码符合相关国家/行业规定的前提下,条形码读取识别率为>99.5%。
# 4.8 周转箱
产品材质:全新PP
产品重量:带盖:3.13±0.2kg;无盖:2.39 ±0.2kg
产品外尺寸:600×400×320mm
产品内尺寸:565×370×300mm
单箱承重:单箱可承重50kg
不带盖时,实箱之间不能堆码,会压坏下面箱子内的货物

- 预留RFID芯片区以及条码信息区:
箱子拉手左侧预留RFID芯片安装区,右侧预留条码粘贴区,并均有保护设计。

- 底部防滑:箱底设有网格状底纹,用于底部防滑。

# 第五节 电子标签系统
# 5.1 电子标签
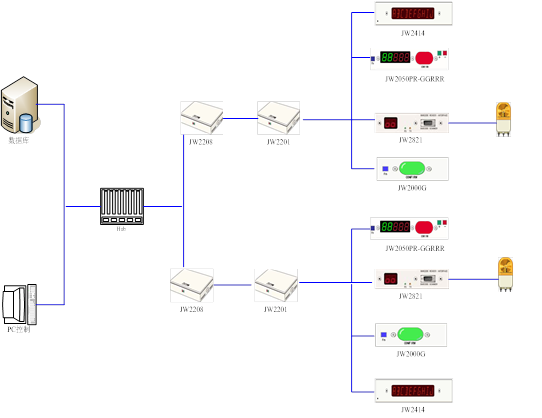
电子标签系统通常是由控制PC机、系统网络、电子标签组成,其工作过程一般为控制PC机将客户订单中的商品数量通过系统网络传输到仓库货架上的对应电子标签显示,并提示拣货人员捡取相应数量的商品,拣货人员完成拣货后按下确认键即可。
采用爱鸥公司的三位数多色电子标签。


# 5.2 电子标签参数表
| 型号 | 图示 | 说明 | |
|---|---|---|---|
| 1 | MWU2030PF |  | 导轨型电子标签(含FN s/- 键型) 文字大小14.2mm SIZE:141.6×37×26.6(mm) 显示位数:3位数字显示 亮度:30mcd(流明)LED 蜂鸣、灯光导引 灯光颜色:7色 1N按压:1000万次以上 工作温度:-30℃-50℃ 相对湿度:0%-80% 确认按键触点双备份设计 标签和金属导轨触点双备份设计 导轨底座与电子标签防水以及防尘等级相当IP53 |
| 2 | CTW2201 |  | 接线箱 最多连接电子标签台数:160台 最多连接指示灯台数:5台 最多连接字幕显示屏台数:1台 电源:AC85V—264V Size: 370×290×91(mm) |
| 3 | CTW2208-2061 |  | 以太网接线箱 最多控制电子标签台数:5120台 最多连接电子标签台数:160台 通信协议:TCP / IP 通信方式:载波通信 电源:AC100V/240V Size: 370×290×130(mm) |
| 4 | CAW2821 |  | 扫描枪串口 条码扫描及TW专有网络输入 多种条码信息输入 |
| 5 | JWD2001 | 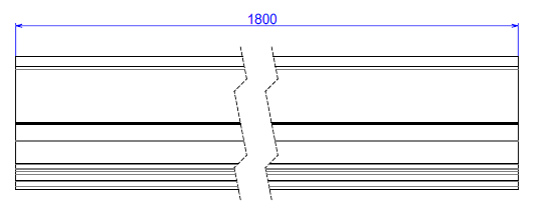 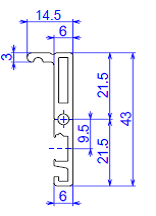 | C型铝合金制导轨 SIZE(mm):1800x43x6 |
| 6 | MWUE2001L MWUE2001R | 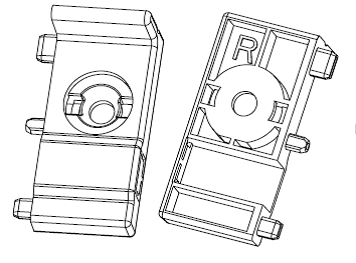 | C型导轨管封头 SIZE(mm):42.96x19.96x14.5 |
| 7 | AW黑色2芯线 | 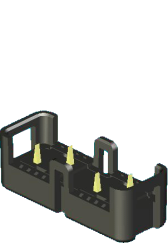 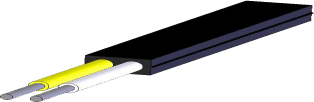 | 导线形状:1.5sq 导线:白.黄色绝缘体 使用环境:零下25度--85度 导线规格:300V/105度 |
| 8 | 专用接线夹(含NA和NB) |  | 只需平常金属钳按压可以进行简单的连接配线 |
| 9 | MWU2414字幕显示屏 |  | 可显示12位中英文字 导轨型,可与标签一同安装 文字大小:13.8mm Size:217x40x20mm |
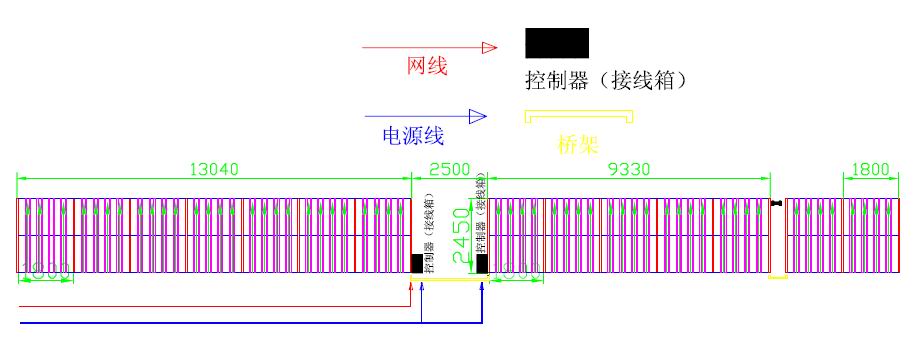
# 5.3 电子标签安装示意图
(示意图)
1、在蓝色线条箭头所指示的位置提供由UPS(不间断电源)提供的220V电源。
2、在红色线条箭头所指示的位置提供100M以太网网络接口。
3、货架断开部分需要通过桥价连接,以方便电子标签布线。
(示意图)
1、电子标签安装于流利式货架横梁处。
2、货架断开处使用桥架连接,便于布线、美观。
# 5.4 电子标签特征
- 形状变更
采用铝合金导轨,增强了原有塑料制导轨的强度,可以回收再利用,从而起到环保的效应。
利用AI导线,可以直接将标签插销脚直接插到导线中,不需要各位配置END基板。
标签拆卸比较容易,因此可以对应自由变更货位。不需要盖板,比原有工程施工安装更加容易。
- 消費電流减轻
与原有的JW2050F相比,约减少40%消费电流,一台JB最多能连接原有JW电子标签五位数95台,现一台JB可以连接MWU2060PF最多160台。

- 位数分割变更
原有标签根据数码管颜色,显示货架番号,拣选数量;现MWU电子标签在原有基础上可以利用印刷技术,根据客户现场需求隔开显示数位从而达到降低成本的功能。
- 选择品
作为选择性产品,将来会结合货架牌以及RF-ID功能进行研制开发。


# 5.5 电子标签功能
计算机中心接收处理的客户订单透过以太网络到达现场的PC上,系统下载数据,并透过讯号分配器将信号传输到已安装在配送中心拣货作业区域货架上的各个电子元件上,并通过电子标签上LEN灯光及数字的显示需拣此商品的数字,提醒拣货作业人员进行拣货。
可以和物流信息系统对接,建立物流作业管理系统,使整个仓库管理能够纳入整个企业信息系统管理的网络中实现。
系统支持多任务并行作业,可同时执行多个分拣作业任务。
系统可自动生成各种输出数据报表(可选择输出或不输出)。
系统具有拣货功能,分为多个独立的拣货区。
系统具有独立的补货功能,可实现主动补货。
系统具有设置安全库存功能,可实现自动补货功能。
系统具有盘货功能,可实现安装电子标签物料架上的物资盘货。
系统具有查询分析功能,例如:输入单个的物料号,即可查到该物料的相关信息。
系统具有权限设置功能,不同权限的人员,拥有不同的工作职责,权限高的人员有优先级。
系统具有分拣作业各环节的数据实时采集,管理人员可实时监控分拣作业状态。
系统具有紧急订单处理功能。
系统具有即时现场控制功能。
# 第六节 自动控制系统及系统集成
# 6.1 设计思想
根据招标要求和该项目的特点,自动化立体仓库及其配套系统项目采用当前自动化领域内中最前沿的自动化总线PROFINET解决方案,PROFINET技术是未来自动化总线技术发展的趋势。
该自动化物流系统的总体设计思路为“集中管理、综合与分片监控相结合、分散控制、减少人工和易于维护升级”。控制系统的原则以“稳定性好、可靠性高、易维护性,易操作性、最先进性和独立性”。底层设备控制系统可向上位管理调度系统上传现场生产设备状态、工艺数据和传递信息。上位管理调度系统可向下发布物流调度信息,采集生产现场的各种数据。在控制系统中,控制系统的总线对系统的可靠性极为重要,为此该方案选择了PROFINET作为现场工业控制总线。主要考虑到使用PROFINET,设备可以从现场层直接到管理层,实现从顶层到底层的透明通讯,可以实现系统范围内的通讯,并支持范围内的工程和组态,直到现场层均采用IT标准,PROFINET甚至允许通过工业以太网时钟同步的运动控制应用程序。
 PROFINET由PROFIBUS国际组织(PROFIBUS
International,PI)推出,是新一代基于工业以太网技术的自动化总线标准。作为一项战略性的技术创新,PROFINET为自动化通信领域提供了一个完整的网络解决方案,囊括了诸如实时以太网、运动控制、分布式自动化、故障安全以及网络安全等当前自动化领域的热点话题,并且作为跨供应商的技术,可以完全兼容工业以太网和现有的现场总线(如PROFIBUS)技术,保护现有投资。
同时,PROFINET支持的全局诊断功能,能够更全面、更快、更方便地协助工程技术人员判断系统故障的所在。PROFINET具有的CBA功能,能最大限度地减少通信编程调试的工作量,更多地缩短工程调试时间。通过集成PROFINET接口,分布式现场设备可以直接连接到PROFINET上。
PROFINET由PROFIBUS国际组织(PROFIBUS
International,PI)推出,是新一代基于工业以太网技术的自动化总线标准。作为一项战略性的技术创新,PROFINET为自动化通信领域提供了一个完整的网络解决方案,囊括了诸如实时以太网、运动控制、分布式自动化、故障安全以及网络安全等当前自动化领域的热点话题,并且作为跨供应商的技术,可以完全兼容工业以太网和现有的现场总线(如PROFIBUS)技术,保护现有投资。
同时,PROFINET支持的全局诊断功能,能够更全面、更快、更方便地协助工程技术人员判断系统故障的所在。PROFINET具有的CBA功能,能最大限度地减少通信编程调试的工作量,更多地缩短工程调试时间。通过集成PROFINET接口,分布式现场设备可以直接连接到PROFINET上。
PROFINET支持星形、总线形和环形拓扑结构。为了减少布线费用,并保证高度的可用性和灵活性,PROFINET提供了大量的工具帮助用户方便的实现PROFINET的安装。特别设计的工业电缆和耐用连接器满足EMC和温度要求,并且在PROFINET框架内形成标准化,保证了不同制造商设备之间的兼容性。
PROFINET实现了从现场级到管理层的纵向通讯集成,一方面,方便管理层获取现场级的数据,另一方面,原本在管理层存在的数据安全性问题也延伸到了现场级。为了保证现场级控制数据的安全,PROFINET提供了特有的安全机制,通过使用专用的安全模块,可以保护自动化控制系统,使自动化通讯网络的安全风险最小化。
所有控制系统采用集中与分散结合、自动与手动相结合的控制方式使系统具有灵活的操作性,设计过程既考虑了系统工艺要求,又确保操作控制方便自如。
另外,工业现场配有MP277 10寸SIEMENS工业触摸屏,用以显示各种状态及各种操作,建立多条网络,灵活地联接在一起,组成一个完整可靠稳定的控制系统。简单的布置和清晰的网络结构降低了系统的维护时间,为系统的扩展留出余地。
# 6.2 PROFINET
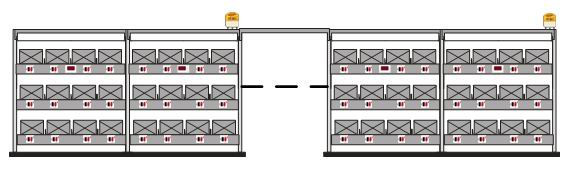
根据响应时间的不同,PROFINET支持下列三种通讯方式:
# 6.2.1 TCP/IP标准通讯

PROFINET基于工业以太网技术,使用TCP/IP和IT标准。TCP/IP 是IT 领域关于通信协议方面事实上的标准,尽管其响应时间大概在100 ms的量级,不过,对于工厂控制级的应用来说,这个响应时间就足够了。
# 6.2.2 实时(RT)通讯
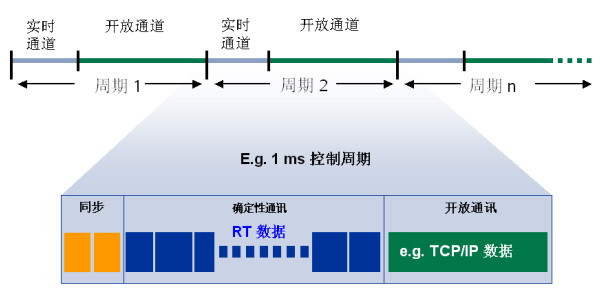
对于传感器和执行器设备之间的数据交换,系统对响应时间的要求更为严格,因此,PROFINET提供了一个优化的、基于以太网第二层(Layer 2)的实时通讯通道,通过该实时通道,极大地减少了数据在通讯栈中的处理时间,PROFINET实时通讯(RT)的典型响应时间是5-10ms
# 6.2.3 同步实时(IRT)通讯
在现场级通讯中,对通讯实时性要求最高的是运动控制(Motion Control),PROFINET的同步实时(Isochronous Real-Time, IRT)技术可以满足运动控制的高速通讯需求,在100个节点下,其响应时间要小于1ms,抖动误差要小于1μs,以此来保证及时的、确定的响应。
# 6.3基本功能
# 6.3.1设计原则及特点
为了系统的运行可靠,技术先进,遵循以下的设计原则特点:
◆ 全线控制系统稳定、可靠、先进;具有完善的维修手动/机上手动(地面手动)/监控手动/自动控制功能/安全保护功能、提供操作简便的人机界面,使操作维护易于进行等;
◆ 全线控制系统采用先进成熟的控制方式、新型工艺设备;
◆ 设备控制层工艺流程合理、层次清楚,符合物流系统的生产及信息管理要求;
◆ 全线控制系统集中控制与分散控制相结合,既利于管理也便于现场操作、安装、调试和维修;
◆ 全线控制系统操作简便、维护方便;
◆ 器件选型严格,保证控制系统的高可靠性和安全性。
# 6.3.2现地控制功能
系统的现地控制柜可以现场的一些设备进行手动启停控制,对于像堆垛机,都配备独立的PLC和控制柜,可以很方便的进行操作。当系统处于现地控制有效状态时,中控室的操作员工作站计算机对现场设备仅能进行状态监视而不能进行远程的控制。
系统的现地控制可以通过两种方式实现:
A、操作人员可以通过控制柜上的TP1200人机操作屏对设备进行控制;
B、操作人员也可以直接通过控制柜上的按钮、开关等对设备进行控制;
系统的控制方式分为手动、自动、本地和远程控制,同时具有严谨相应的连锁保护。
# 6.3.3 远程控制功能
当系统控制方式切换至集控方式时,设备的开启和停止由中控室的操作员工作站计算机完成。操作员可以通过计算机对仓库内设备进行集中连锁控制或者单独控制。
由于中控室远离现场,因此远程控制一些设备的启停可能会导致事故甚至是人员伤害,有鉴于此,系统不仅设计了设备操作等的远程控制功能,而且在远程控制流程中加入了后台安全互锁设计,动作条件更加严格,确保远程操作不会有误操作发生,避免可能产生的设备故障。
# 6.4 总体结构及控制系统组成
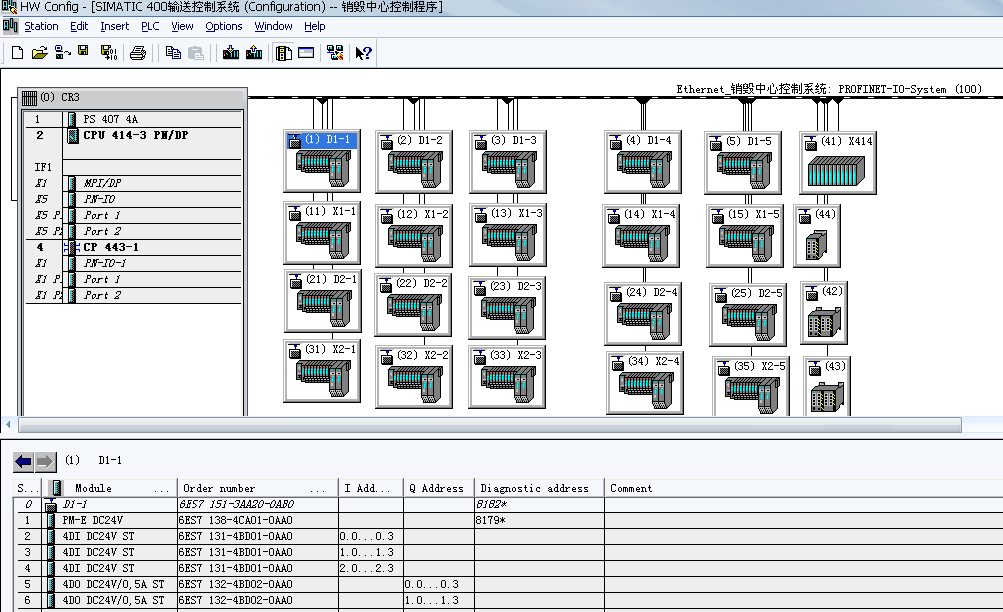
根据经验和深入分析,对上述设备控制的CPU进行了严格选型,整个控制系统的PLC均选用功能强大可靠的SIEMENS公司的工控产品,地面输送系统采用SIEMENS公司的CPU300 2PD,堆垛机采用CPU300PTP,工业现场配有SIEMENS触摸屏。
网络由最新的西门子公司的工业以太网交换机搭建,连接高速以太网网络,保证在网络上一点发生故障时正常通信,也可以在不中断通信的情况下,随时进行网络扩展,充分的保证系统的可靠性。交换机为上层管理网络提供了百兆的通信接口,也为各个子系统的集成提供了一个开放的平台。该型交换机全面支持VLAN和路由功能,有效的减轻网络负载和防止网络风暴的发生,进一步提升了网络的可靠性。连接控制网络和库区外部网的模块能够隔离内网和外网的非安全连接,有效屏蔽外网的非授权访问和其他不安全信息的传播,同时又能保障有效信息的通信。
整个仓库网络架构采用集成工业以太网PROFINET现场总线体系结构,上层管理级网络采用以太网方式,控制系统各独立控制器PLC之间采用工业以太网PROFINET的TCP/IP通讯,地面控制系统也采用PROFINET-IO现场总线结构实现各个输送设备的分布式控制。
物流仓储系统电气系统控制结构如图所示。
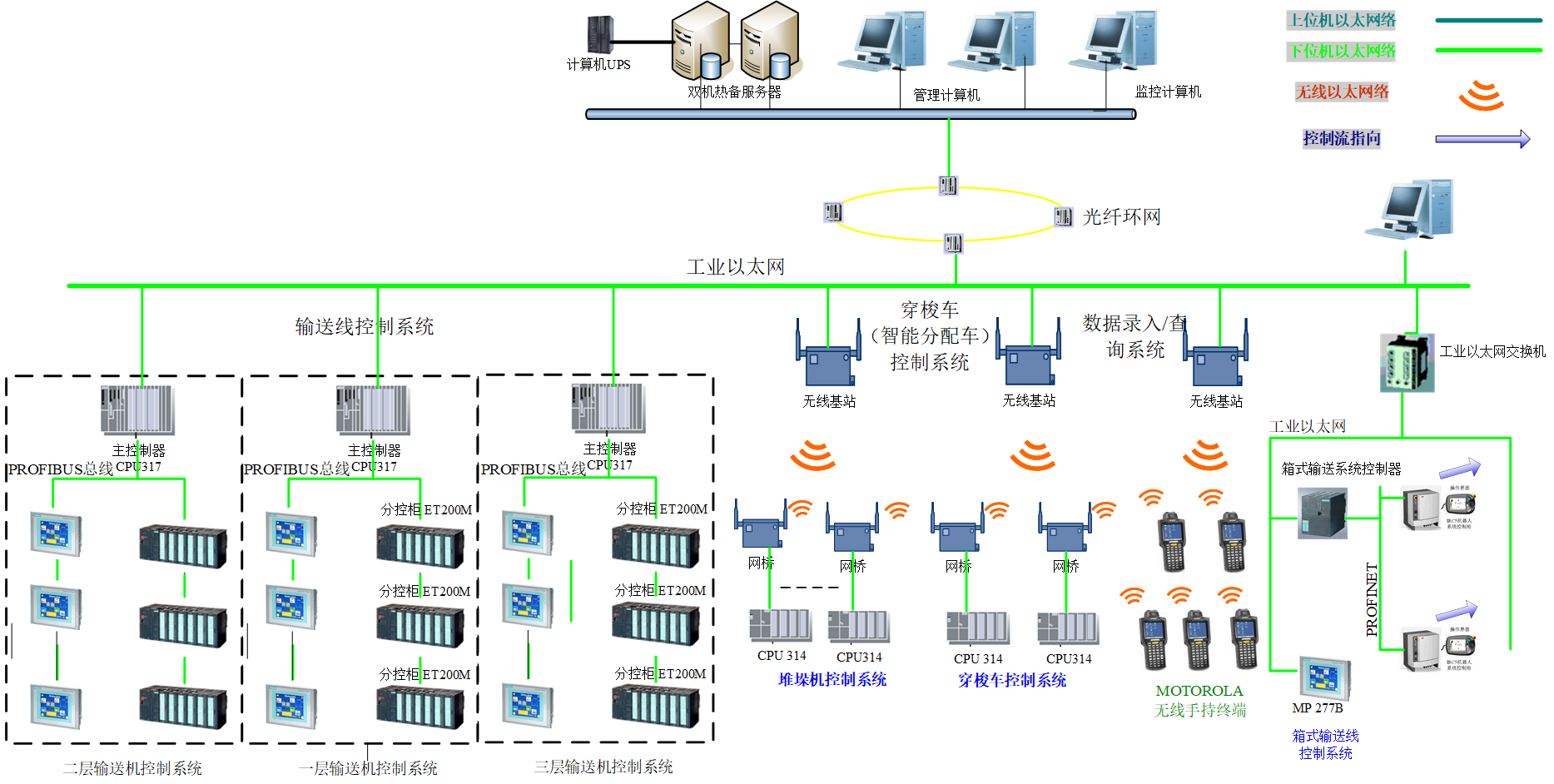
控制系统网络结构示意图
可见控制系统采用PROFINET网络,连接分布于输送机的传感器和执行机构,将现场分布式I/O等直接采用总线电缆连接,实现了数字和模拟输入输出信号,把I/O信号通道分散到实际需要的现场设备附近,使安装和布线的费用开销减少到最小,从而使成本费用大大地节省。各独立PLC系统完成各自功能,根据设备功能划分,移动设备采用独立PLC进行控制,地面设备采用PROFINET现场总线结构完成分布式控制。移动设备与地面固定设备之间采用无线以太网SCANLANCE W通讯。
这种用于底层设备的低成本、高效率信息集成模式,已经逐渐成为控制领域的主流。管理监控系统与物流仓储配送控制系统之间采用工业以太网结构连接,管理监控系统通过高速以太网采集各控制设备运行状况和物流配送过程数据,实时管理调度物流配送过程,并对现场设备进行实时控制。
# 6.5 堆垛机控制系统
堆垛机上设置一个控制柜,用于实现整个堆垛机系统的自动运行。堆垛机的控制系统采用高稳定性的进口控制设备,配套成熟的堆垛机控制程序,保证巷道堆垛机高效、稳定、可靠的运行。
堆垛机控制系统示意图
# 6.5.1 堆垛机控制系统特点
| 模块化结构,分布式控制 | 简化控制程序,便于操作维护。一旦某台控制单元出现故障,不会导致整个控制系统瘫痪。 |
| 硬件自诊断、故障报警 | 系统在开机后可以对所有电气硬件部分进行自诊断,当某个模块或其他元器件发生故障时,系统将自动报警提示。维护人员可快速更换备用模块或元器件,使系统重新投入运行。 |
| 可实现全自动/手动/半自动操作 | 在全自动状态,堆垛机控制器与监控计算机自动进行数据、信息交换,实现自动作业。控制系统可采用半自动方式,对堆垛机下发指定货位出入库指令。当监控计算机出现故障时,堆垛机控制系统仍然可以通过半自动方式,独立地进行出/入库作业。 |
| 运行兼顾高速与平稳 | 采用模拟量控制交流闭环变频调速方案可满足堆垛机高速运行和平稳入/出库操作的需要。 |
| 条码识别器在堆垛机控制系统中的应用 | 利用条码识别器实现了堆垛机对托盘自动进行货位地址分配、出库校验、自动盘点的功能,相当于给堆垛机安装了一双眼睛,充分提高系统的可靠性。 |
| 保护措施 | 采取一系列电气联锁保护措施,可对异常情况进行自动报警或处理,并向监控计算机反馈处理结果。 |
| 自动修正 | 控制程序具备正、反两个方向点动控制功能,防止惯性冲程造成的过量停机偏移。 |
| 定位精度 | X:士5mm;Y:士5mm;Z:士3mm |
| 堆垛机的作业种类多 | 堆垛机能够实现自动入库、单双出库、盘库、搬库、直出、指定点、指定入库和指定出库等多种作业方式,可根据自动化立体仓库的特点进行合理配备 |
# 6.5.2 高标准化和高可靠性的控制程序
堆垛机控制程序的标准化主要体现在系统运行的参数化上,系统运行参数化的意义在于,增强堆垛机运行参数的可控性,缩短堆垛机控制系统的调试时间,有利于上位机操控堆垛机。这样做可以简化我们对堆垛机控制程序的修改量,也便于设备正常使用时,操作员根据实际需要,通过监控系统(WMS)方便地修改堆垛机的运行参数。例如,我们要加快堆垛机水平的运行速度,我们并不需要修改堆垛机的程序,我们只需要在变量表中写入新的水平运行参数或者通过监控系统(WMS)修改参数就可以了。这样的工作表面上看着简单,但这简单操作的背后要有复杂的后台控制程序支持。
堆垛机控制程序的可靠性主要体现在系统动作运行的可靠性,堆垛机认址定位的准确性和电气系统报警的可靠性上。动作运行的可靠性主要体现在堆垛机水平、垂直和货叉运行控制程序的可靠上,我们的通过PLC的模拟量速度给定控制变频器进行无级调速做到了这一点,同时我们通过激光测距仪的绝对认址等方式实现了设备的定位精度在±5mm之内的高准确性,这就保证了堆垛机存储货物时存储定位的准确可靠。此外,在系统的运行的过程中,我们对堆垛机每个传感器都做了实时的检查和控制程序校验,使每个传感器的不同故障状态都有报警,这样保证了我们能及时发现系统故障状态,并在萌芽状态处理它,使整个堆垛机系统不出现大的故障。
# 6.5.3 成熟完善的人性化单机操作界面(HMI)
我们在每台堆垛机上设置了单机操作界面,此单机操作界面,可以实时显示堆垛机的所有状态信息和报警信息,能够对堆垛机进行相应的控制,并且设置了权限,对不同的人员进行区分,确保系统的安全性,方便客户的管理。操作员可以实时监视堆垛机每个输入检测点和输出控制点的状态,以及堆垛机的水平速度、垂直速度和货叉速度等状态变化量,可以设置堆垛机的运行方式和系统参数,也可以观察堆垛机的故障报警信息。
通过人机界面增加设备与操作员的接口,可以使操作员实时监控控制系统状态,方便平时设备的正常操作和系统维护。
# 6.5.4 精确的定位系统
我们的堆垛机认址定位系统可根据客户的需要和现场的实际情况,进行灵活的选择,本项目选择激光认址+旋转编码器认址方式,能够非常精确地进行定位,实现了设备的定位精度在±5mm之内的高准确性。
# 6.5.5 灵活实用的通讯解决方案
根据客户需求和现场的实际情况,采用无线通信系统解决方案,增加了系统的高效性、可靠性、通用性和灵活性,使得堆垛机系统内的通信子系统向前跨了一大步,应用工业无线网络WLAN,选用国际知名品牌(MOXA)无线基站和网桥,使整个堆垛机的通信系统稳定性和灵活性上了一个台阶,管理系统可以通过以太网络访问和监控堆垛机系统,同时,也大大增加了系统的可扩展性。
1、基站MOXA AWK-3121系列为符合IEEE 802.11a/b/g标准的工业级单射频无线网桥/基站,符合QoS(WMM)和VLAN的有效的网络流量,支持长距离的数据传输及100毫秒的Turbo roaming技术,WEP / WPA / WPA2/802.11X拥有最大化的安全功能和强大的过滤器,符合EN 50155关键标准,支持PoE和双直流电源输入。
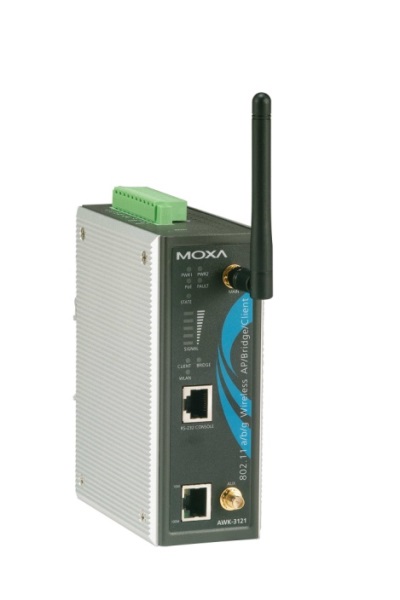 无线局域网接口:
无线局域网接口:IEEE 802.11a/b/g for Wireless LAN;IEEE 802.11i for Wireless Security;IEEE 802.3 for 10BaseT;IEEE 802.3u for 100BaseTX;IEEE 802.3af for Power-over-Ethernet;IEEE 802.1D for Spanning Tree Protocol;IEEE 802.1w for Rapid STP
工作频道(central frequency):
2.412 ~ 2.472 GHz
5.18 ~ 5.24 GHz
- 安全:
SSID广播开闭功能
基于MAC/IP/ 协议/ 端口过滤的防火墙技术
64-bit and 128-bit WEP encryption, WPA /WPA2-Personal and Enterprise (IEEE 802.1X/RADIUS, TKIP and AES
2、网桥MOXA AWK-1131A系列为符合IEEE 802.11a/b/g/n标准的工业级单射频无线基站,数据传输率高达300Mbps,满足了不断增长的快速数据传输要求。AWK-1131A符合各项工业认证,包括工作温度、电源输入电压、浪涌保护,ESD保护和抗振性。AWK-1131A具有两个直流电源输入,提高了供电可靠性。AWK-1131A能够在2.4或5GHz频段下操作,并且兼容目前的802.11a/b/g。
1)无线局域网接口:
IEEE 802.11a/b/g/n适用于Wireless LAN;IEEE 802.11i适用于Wireless Security;IEEE 802.3适用于10BaseT;IEEE 802.3u适用于100BaseT(X);IEEE 802.3ab适用于1000BaseT
 2)工作频道(central frequency):
2)工作频道(central frequency):
2.412 ~ 2.472 GHz
5.18 ~ 5.24 GHz
3)安全:
SSID广播开闭功能
基于MAC/IP/ 协议/ 端口过滤的防火墙技术
64-bit and 128-bit WEP encryption, WPA /WPA2-Personal and Enterprise (IEEE 802.1X/RADIUS, TKIP and AES
4)数据速率:
802.11b: 1,2,5.5,11 Mbps
802.11a/g: 6,9,12,18,24,36,48,54 Mbps
802.11n: 6.5 ~ 300 Mbps (multiple rates supported)
# 6.5.6 先进可靠的模块和配件
堆垛机控制系统
| 设备 | 型号 | 图例 | 厂商 |
| PLC | 德国SIEMENS S7-300 | 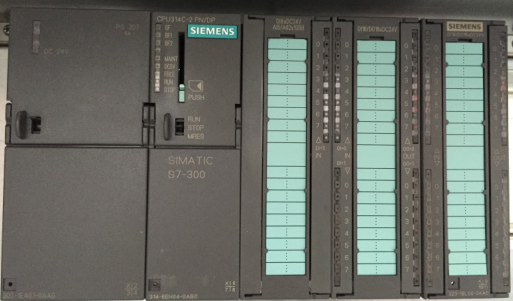 |  |
| 变频器 | 德国SIEMENS |  | |
| 激光测距仪 | 德国LEUZE |  |  |
| 编码器认址 | 德国Hengstler |  |  |
| 滑触线 | 德国法勒 |  |  |
| 空气开关 接触器 | 法国施耐德 |  |  |
| 其他 | 光电传感器 接近传感器 行程开关 空气开关 条码识别器 等 |  |       |
# 6.6 输送线控制系统
输送设备控制使用2套西门子的S7-300控制器作为核心,采用PROFINET网络将分布于现场ET200M连接,用于采集各种传感器开关信号和控制信号,现场控制柜和指示灯可以显示状态信息和操作。简单的布置和清晰的网络结构降低了系统的维护时间,为系统的扩展留出余地。
该套控制系统控制的设备有出库托盘输送系统设备,入库托盘输送设备等。
输送设备如链式机采用ET200M的电机单向和双向电机启动器,该启动器集成断路器、热保护,通过网络直接控制,运行非常平稳,控制柜配线简单,维护量少,系统独立性好,关键复杂输送设备具有手操、指示灯和报警灯,易于操作、维护和升级;
输送设备具有远程诊断和通讯功能,输送线设有触摸屏,显示各种状态和报警信息,方便操作。

# 6.7 控制系统的特点
该控制系统的配置以当前最先进的电气配置,控制系统有如下特点:
西门子控制器和电气元件,PLC-300控制器,系统简单,极易维护;
现场总线PROFINET,作为PROFINET I/O从站与系统联网;
稳定可靠,易操作,易升级,可扩展;
模块化结构,分布式控制,易维护;
堆垛机和库端输送系统采用工业以太网实时通讯;
自动报警,如某个检测开关故障时,系统将自动报警提示;
操作方式灵活,实时数据、信息交换,实现入/出库的自动作业,可采用单机自动或手动方式,独立地进行出/入库作业;
控制精度高,可自动修正,确保停准;
安全性好,采取一系列联锁保护措施,可对异常情况进行自动报警或处理;
具有远程控制能力,尤其是在中控室也可监控手段操作,无需进库即可操作和维护,大大提供效率;
总之,该控制系统保证了系统具有良好的动态品质,达到高效率、高精度、高可靠性、运行平稳,所选电气关键元件全部采用进口元件,系统具有精度高、可靠性好和响应速度快等特点。
# 6.8 控制设备工艺说明
# 6.8.1屏柜设计
本系统所有屏、柜、台均坚固适用,易于维修和更换内部元器件。操作手柄、仪表、指示器具均在地面以上0.6~1.8m。所有屏柜的门锁为同一型号。屏面上的所有器具均采用嵌入式结构安装,其布置清晰合理,每个屏柜内配有一个AC250V、5A插座、一个照明灯。控制屏、柜、台的外形尺寸符合GB3047.1的规定,柜体颜色推荐使用RAL-7032。控制屏、柜、台的防护等级室内不低于IP 42,室外不低于IP 54。屏、柜、台结构牢固,能承受运输和正常使用条件下可能遇到的机械、电气、热应力以及潮湿的影响。所有黑色金属件均有可靠的防护层并经过防锈处理,各紧固处皆有防松装置。屏、柜、台表面平整,无凹凸现象,油漆颜色均匀一致,漆面整洁美观;有与地基固定的安装孔,安装尺寸符合制造图纸的要求;顶部加装吊环或吊钩;门能在不小于90的角度内灵活启闭;除非另有规定,所有屏、柜、台均采用自然冷却方式;设备预留20%的备用端子,以备将来扩展。
柜内元器件均贴有标志,与电气图对应。




# 6.8.2屏柜布线
导线连接方式采用压接、焊接或插接,并符合有关标准的规定;所有端子的连接线牢固,一个端子只连接一根电缆芯;经常移动的连接线采用多股铜绝缘软线,并有足够长度裕度和适当的固定,以免急剧弯曲和产生过度张力;交流电源线及高电平回路与低电平回路分束走线,并有合理的间隔,必要时采取隔离或屏蔽措施;凡电气原理图或接线图上有回路标号的导线端部均标出回路编号,标号清楚、牢固、完整、不褪色;设备内部接线应用标准导线,所有接线使用防火型槽管保护,外露接线束在一起,用适当的夹具固定或支持,导线均沿水平或垂直走向,导线截面一般不小于1.5mm2;设备的内部接线在工厂完成,出厂前进行全面检查。


# 6.8.3自动化元件
所有布置于控制柜外的自动化元件的防护等级均不低于IP 40,现场分布式I/O防护均不低于IP 54。
所有设备均具有足够的抗电磁辐射干扰能力,可靠的抗雷电干扰措施,以保证所有设备能安全可靠运行。
浪涌抑制能力(SWC)
1~1.5MHz衰减振荡 2.5kV
1.2/50μS冲击波 5kV
无线电干扰(RI)
30~500MHz 10V/m
静电干扰(ESD)
150Pf—l50Ω 8kV
所有设备均能承受下述试验电压,在输入电源接口与地之间均有足够的绝缘阻抗。
300V以上端子与外壳间承受AC 2.5kV电压1分钟。
60V~300V端子与外壳间承受AC 2kV电压1分钟。
60V及以下端子与外壳间承受DC 500V电压1分钟。
设备安装、接线完毕,交流外部端子对地绝缘电阻不小于10MΩ,不接地直流回路对地绝缘电阻不小于1MΩ。
# 6.8.4其它材料和部件
所有材料和部件都按有关标准经过严格的测试、检验和筛选,是高质量的,满足高强度、长使用寿命和机电特性的要求。
# 6.8.5控制及通讯电缆
所有控制、信号电缆采用屏蔽电缆,通讯电缆采用专用电缆。在桥架里铺设时与供电电缆隔离保护。

# 6.8.6桥架安装规范
采用不锈钢槽式电缆桥架。
当桥架内同时有电力电缆和控制电缆时,必须用隔板将电力电缆和控制电缆隔开敷设。
电缆桥架水平敷设时,桥架之间的连接头应尽量设置在跨距的1/4左右处,水平走向的电缆每隔2米左右固定一下,垂直走向的电缆每隔1.5米左右固定一下。
电缆桥架装置应有可靠接地,如利用桥架作为接地干线,应将每层桥架的端部用16mm2软铜线连接(并联)起来,与总接地干线相通。长距离的电缆桥架每隔30-50米接地一次。
电缆桥架装置除需屏蔽保护罩外,在室外安装时应在其顶层加装保护罩,防止日晒、雨淋。如需焊接安装时,焊件四周的焊缝厚度不得小于母材的厚度,焊口必防腐处理。


# 第七节 仓库管理信息系统(WMS)
# 7.1设计依据
软件开发标准及规范:
GB 8566-88 计算机软件开发规范
GB 8567-88 计算机软件货物开发编制指南
GB/T12504-90 计算机软件质量保证计划规范
GB/T12505-90 计算机软件配置管理计划规范
0137HB/Z178-90 计算机软件验收基本要求
0137HB/Z180-90 计算机软件质量特性评价方法
GB/T14079-93 计算机软件维护指南
GB/T14393-93 计算机软件可靠性和可维护性
GB/T13423-92 工业控制用软件评定准则
GB/T14085-93 信息处理系统计算机系统配置图符号及约定
GB9385-88 计算机软件需求说明编制指南
GB/175441998 信息技术软件包质量要求和测试
GMP 药品生产质量管理规范
GSP 药品经营质量管理规范
GAMP5 良好自动化生产实践指南
FDA 21CFR Part11
我所自主研发的自动化立体仓库计算机管理系统已成功在广州海瑞药业有限公司、江苏紫龙药业有限公司、江苏海岸药业有限公司实施,并为其提供了按照第五类软件系统验证的计算机系统验证文件。其中广州海瑞药业有限公司已通过GSP认证,紫龙药业有限公司通过了GSP、GMP认证。


# 7.2系统结构
本方案的WMS设计采用基于业务流的标准系统设计方法、标准的B/S体系结构和C/S体系结构,在充分分析企业作业现状和预测未来发展的基础上,设计完整的WMS,提供完善的信息管理解决方案。
WMS完成物流自动化管理,实施过程中能根据用户应用要求进行适当的调整。对物流系统运行状况进行评估,力求设备最大利用率和合理的物流。为各管理部门提供有价值的决策信息。
WMS在稳定性、可靠性、高效性和合理性价比原则下采用成熟先进技术,提高系统的信息化和自动化程度、降低操作的复杂性。保证数据准确率、物流输送准确率和计数准确率。WMS对库内物流传输过程实施全程快速信息跟踪和信息反馈,以保证系统信息的实时性和信息的准确性,实现仓库作业的全员绩效管理。
计算机管理监控系统总体框图如图所示。
# 7.3软件系统创新
# 调度系统Petri网络
整个立体仓库调度采用面向对象赋时着色petri网技术进行建模与算法设计,用OOTCPN建模方法建立的单元模型具有Petri网的特性,能够描述AS/RS调度问题中存在的并发、异步、协同、冲突、分布式、非确定性、资源共享等现象。
面向对象赋时着色petri网技术
调度原则有如下几种:
1、先到先服务原则:这是调度的基本原则之一,不考虑任务类型和优先级等因素,先到的申请先处理。这种原理适用于同类任务或优先权对系统影响很小的系统。
2、优先权原则:因为自动化立体仓库系统中各项任务的实时性要求不同,因此将任务赋予优先权,在处理任务时,按优先级的高低排序,优先响应优先权最高的任务。
3、处理时间最短原则:每一个任务的完成时间是不相同的,先处理那些完成时间短的任务申请,减少产品在线贮存量。这一规则对完成任务小、批次多的系统尤为适用。
4、处理时间最长原则:按完成时间长的任务排队,优先处理完成时间最长的任务。
5、随机规则:不考虑任务的优先级,也不考虑任务执行的时间长短,而是从申请任务的队列中随机响应某个申请。这主要是考虑对每个任务的均衡响应。
6、联合出入库原则:在有多项出库和入库任务时,适当把出库任务和入库任务进行优化组合,满足条件的出库任务和入库任务组合成联合作业,可缩短存取周期,提高存取效率。
7、中断抢先原则:在任务执行的过程中,将一批任务分成若千个存取单元,每执行完一个单元,都再次执行调度,从而保证优先级较高的任务可以被及时执行。
# 货位管理
利用遗传算法根据品种或者业务部门的要求对整个货架进行优化分区,

分配管理原则如下:
1、分巷道存放原则:目的是提高仓库的可靠性。要求将同一种规格的产品尽量均匀分散在不同的巷道进行存放。这一原则可以使所有的堆垛机同时高速运行,并能防止某一台堆垛机损坏或某一巷道发生阻塞而不能进行出入库操作,造成生产中断和物流阻塞。
2、就近原则:这一原则可以提高效率。不同频率、重量的产品在立体仓库中的位置也是不相同的,按就近原则,入库时在相应的区域内寻找最靠近入口的空货位,出库时寻找时间最早又最靠近出口的产品,这样使出入库时间最短,达到提高效率的目的。
3、货架受力均匀原则:上轻下重,使货架受力稳定;分散存放,产品分散存放在仓库的不同位置,保证货架受力均匀,防止货架因受力不均匀而发生变形、倾覆的现象。
4、先入先出原则:以加快周转,即同种产品出库时,先入库者,先提出库,以加快产品周转,避免因产品长期积压产生锈、变形变质以及其它损坏。
5、货位分区原则:根据产品出入库频率和特性,将立体仓库划区分段,提高存储效率,方便管理。
# 统计分析
对系统各个设备的运行时间,设备的运行距离进行累计,对系统各个硬件设备的故障率进行统计分析,并给出分析结果以便于系统各个设备针对行的维护。

# 7.4硬件结构
WMS硬件结构采用浏览器-客户机/服务器结构。WMS用户界面使用客户端应用程序,调度监控工作站均使用客户端应用程序。
数据服务器采用双机热备服务器。所有数据均由数据服务器统一管理。数据服务器同时作为网络服务器,为管理工作站浏览器提供网络服务。信息管理、设备调度、设备监控和控制系统均在统一的以太网中。系统硬件结构如图所示。
信息管理系统硬件结构示意图
系统硬件结构特点:
A. 系统安全:采用双机热备的数据服务器进行数据管理,保证系统运行安全和数据安全。两台服务器主机分别安装操作系统,数据库和网站资源目录安装在磁盘陈列中。在正常运行时,一台服务器作为主机运行,另一台为备份。当主机发生故障时,备份机自动切换为主机运行,故障机在修复后可作为备份机运行;
B. 数据共享:数据在统一的数据库中进行处理,各子系统使用统一的数据源,保证各子系统完全实时数据共享;
C. 设备通用性强:所有管理客户机使用统一的程序,界面显示的管理功能由登录操作员和身份和权限确定,必要时可互换。
# 7.5软件结构
信息管理系统软件结构采用分层模块化集成模式,分为用户界面层模块和事务处理层模块两类。系统软件结构如图所示。
信息管理系统软件结构示意图
系统软件结构特点:
A. 数据安全:通过数据库管理系统的管理工具,包括用户管理、权限管理、数据备份、数据恢复、事务处理和日志记录等,保证系统运行安全和数据安全;
B. 数据一致: 数据操作采用事务处理方式进行,保证数据一致性、安全性和准确性;
C. 通用性强: 客户机使用统一的IE浏览,界面显示的管理功能由登录操作员和身份和权限确定;
D. 易于维护:各模块功能相互独立,需要对一个功能模块进行维护时对其它功能没有影响。
计算机应用软件的选型如下:
数据库软件选用Microsoft公司SQLServer2012 数据库。
应用服务器和数据库服务器操作系统选用Windows2012 Server;
服务器双机热备软件选用Rose HA
7.6系统功能概述
仓库管理系统Warehouse Management System(简称WMS)是基于现代计算机信息管理理论与现代生产物流管理理论的软件产物。它同时对物流和信息流进行动态管理和控制,集物流与信息流于一体。WMS是通过入库业务、出库业务、仓库调拨、库存调拨和虚仓管理等功能,综合批次管理、物料对应、库存盘点、质检管理、虚仓管理和即时库存管理等功能综合运用的管理系统,实现完善的企业仓储信息管理。该系统可以独立执行库存操作,与其它系统的单据和凭证等结合使用,可提供更为完善全面的企业业务流程和财务管理信息。可以与上位信息、MES、WCS等多种软件系统对接,更好地提高企业管理的深度和广度。
本系统的WMS是由北京机械工业自动化研究所自主研发的大型仓储物流管理系统,WMS集仓储、物流管理于一体,结合先进的管理理念,实现自动化立体仓库、传统平面库的统一管理,同时系统能够与上位信息系统、V1系统、电子标签系统、AGV等系统紧密结合,实现厂内、厂外物流的一体化管理。主要具备以下特点:
集仓储、物流管理于一体
与企业其它系统的紧密结合
支持各种主流浏览器
基于无线网络的手持终端(RF)操作模式
支持立库、成品等各种仓库类型
与我所的自动化立体仓库控制板块的无缝集成
支持整托、拆零等多种入出库业务模式
支持各种入出库类型管理
支持各种质量状态管理
支持条码打印管理
支持货区、巷道、层、列等多种优先级的地址分配方式
支持自动、手动多种配送模式
支持单件货物扫码跟踪管理
支持仓库、暂存区的统一管理
支持自动化立体仓库、分拣区域、包装配送区域的统一及单独管理
WMS的主要功能是对入出立体库的物流进行动态管理与调度,及时、准确完成货物的入出库,同时对物流信息实现与物流的同步管理。WMS对入出库作业进行最佳分配、调度和控制,对入出库输送机及堆垛机等各种设备的运行状态进行动态显示及在线监控。自动库存台帐为用户提供准确的库存数据信息。
WMS具备丰富的数据管理和查询统计功能,动态图形显示设备运行状态、各存储区域的货位存储情况。
WMS具备与上级信息系统兼容对接能力,若无上级信息系统时,可以独立运行。
WMS实现了与计算机监控调度系统(简称WCS)无缝衔接,可以实现自动化立体仓库和普通货架库的综合管理,在对自动化立体仓库管理中,必须实现WMS可以直接将出入库的信息,下发到WCS,由WCS完成出入库指令,并将出入库状态返回到WMS。系统功能结构图如下:
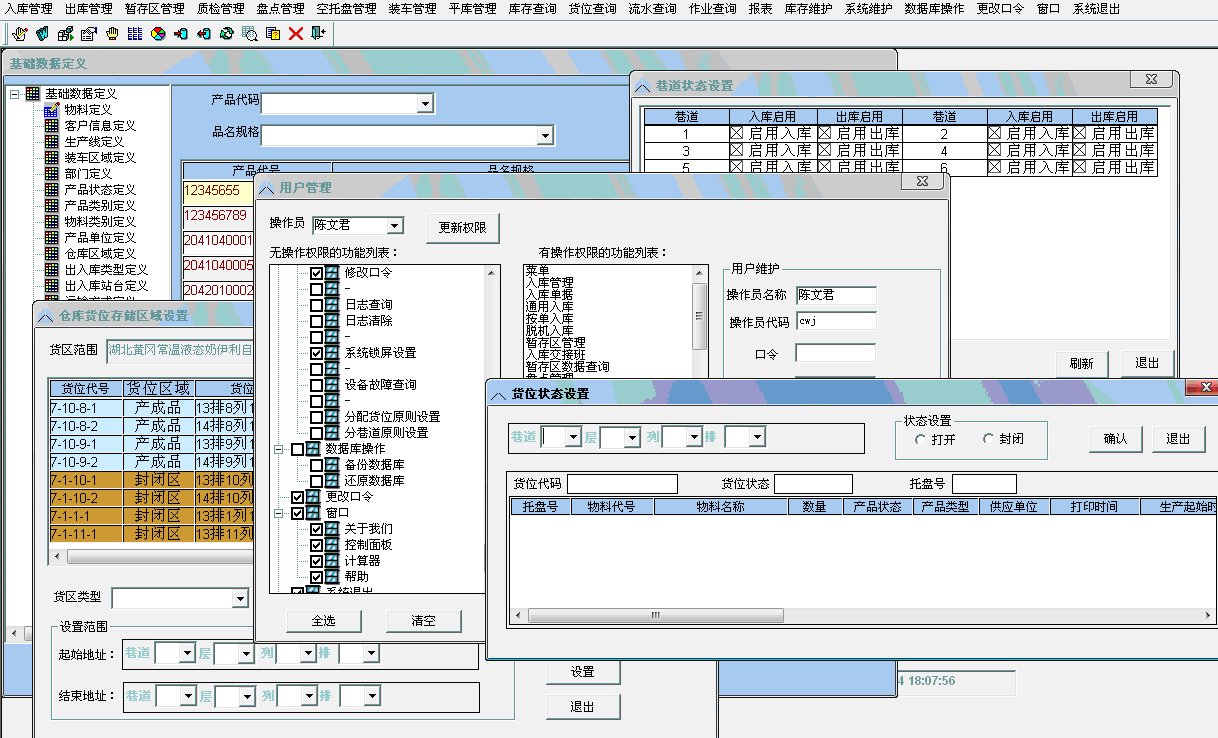
# 系统维护功能
系统维护功能对系统运行的基础数据进行定义和维护,是保证系统能够正常运行的前提。
- 权限管理
每一仓库的工作人员根据其岗位及分工不同,在系统中有不同的操作要求和权限要求。WMS的权限管理可为所有运行系统的操作人员建立数据库登录帐号,设置登录密码,分配使用权限,以确保系统的信息安全。不同操作权限的操作人员,登录进入系统后所看到的系统功能也不相同。
WMS具备:
分层分级的权限控制
基于用户的权限管理
基于角色的权限管理
主要包括:
用户管理:创建用户,包括用户编码、用户名称、登录密码等信息;
角色管理:本系统提供各种角色的定义,如系统管理员、库管员等;
角色功能分配:为各种角色分配操作功能,相同的角色具有相同的功能;
用户角色分配:为操作人员设置角色,这样就实现了相同类型的操作员具有相同的操作功能。
- 基础信息管理
基础信息主要指在系统运行时会频繁使用,但在一定时间内又不会经常变更的数据,如:
货物信息定义:Storage Keeping Unit(SKU) 库存的最小单位,是仓库管理跟踪的最主要标识。货物信息主要包括货物编码、货物名称、规格型号、货物类别、单位、等基本信息,以及物流管理相关的基本信息如:重量、体积、尺寸、托盘承载量、所属库房、库存上下限、库存有效期等。
供应商信息定义(供应商编码、供应商全称、供应商简称)等。
客户信息定义(客户编码、客户全称、客户简称)等。
货物存储库房:货物可以存放在托盘立体仓库,也可以存放在周转箱立体仓库,系统提供货物存放库房定义、按比例存放库房的功能。
货物存储安全(包括储量上、下限数量报警和存储期限定义)定义,根据企业实际情况为仓库总量、每个品种设置上下警戒线,当库存数量接近或超出警戒线时,进行报警提示,及时地进行生产、销售等的调整,优化企业的生产和库存。设置自动提醒功能,系统根据预先设定的存储期限自动给出提示。
库区与货位管理:仓储管理控制系统中,仓库设置是仓库布局和规划的体现,需要与整个仓库物理布局相一致。整个仓库可以根据实际情况划分相应的库区,如可以根据结构设置为:自动立体库区,拣选区,分拣区,包装区、配送区等;也可以根据存储条件设置冷藏库、阴凉库,普通库等;还可以根据功能设置:待验区,退货区,待处理区,冻结货物区等。不同的库区可以设置不同的管理属性和不同的保管人员。库区内可以细分货位。每一货位可以设置对应的坐标位置进行标识。货位也可以根据不同功能设置为:拣货货位、存储货位、搁板货位等不同类型;其中自动立体库区存放高架货位,用堆垛机自动化设备作业。
- 系统维护管理
设备运行参数设置
由巷道状态设置、货位状态设置和入出库优化规则优先级设置等组成。可由系统管理员根据需要对系统运行参数进行调整。
- 设备管理
包括设备运行故障统计、故障处理查询(设备运行频率统计、设备运行状态管理等功能列在设备运行状态显示功能模块中)等。
- 日志管理
用户登录日志管理、操作级日志管理、系统操作痕迹的可追溯。
- 货位分配管理
货位分配要求按货位规划原则以及货物的种类,出入库的频率等情况综合考虑合理规划货位,使得在满足最大出入库频率的前提下尽可能使设备的利用率最低、能耗消耗最小。由于物料的入库比较分散,出库比较集中,因此要求管理软件在建立基础数据时应根据产品相关性进行连接,并据此规划货位。
根据高架库巷道故障情况以及货位使用情况实时智能地对货位分配原则进行修改。其分配原则如下:
同品种分巷道存放原则
就近原则
货架受力均匀原则
货位分区原则等。
# 库存管理
WMS具备许多功能以帮助您管理仓库。通过系统的库存管理模块可以记录产品在系统中的所有活动,用户可查看、追溯系统历史操作记录。同时,由于库存事务中详细记录了每个操作的人员、始末时间、交易数量和交易单号,通过系统您可以方便地完成下面的库存相关的事务管理:
库存有效期维护:对货物在库内存放的最大有效时间进行维护;
多级库存管理:除了按货物名称区分库存外,还具备其他功能,如供应商、产地、产品状态等。以实现从上架、拣货、补货、出库整个流程上的库存区分。
自动补货功能:系统支持自动补货,通过自动补货算法,不仅确保了拣选面存货量,也能提高仓储空间利用率,降低货位蜂窝化出现的概率。系统能够对货位通过深度信息进行逻辑细分和动态设置,在不影响自动补货算法的同时,有效的提高了空间利用率和对控制精度。
# 入库管理
入库管理主要包括:手工创建入库单、入库组盘管理、入库记账等。本WMS入库管理功能具备以下特点:
支持各类仓库、各种类型入库作业
入库地址自动分配(优先级算法)
单据、作业状态控制
结合手持业务操作(组盘、扫码)
入库记账
系统在自动技术最佳上架货位的基础上,支持人工干预,提供已存放同品种的货位、剩余空间,并根据避免存储空间浪费的原则给出建议的上架货位并按优先度排序,操作人员可以直接确认或人工调整。实现对入库信息的管理、并根据作业完成的状态进行入库数据的自动台帐功能,对货位状态进行更改,并增加库存记录。包括入库单据的记录,红字入库,未记帐入库作业处理,入库流水查询,等。入库单据的查询: 根据入库的时间,或者根据入库单据号、批次、货物编码对入库单据进行查询。以入库单号、入库时间为查询依据,查询符合查询条件的入库单据记录,并以列表的形式显示出来。
- 手工创建入库单
本系统不仅支持从上位系统导入入库单作为入库依据,而且具备手工创建入库单的功能。当企业的信息系统不完善时,可在本WMS中创建入库单,并且可以对入库单进行暂停、完成等操作。
- 入库组盘管理
由人工将货物码放到托盘上。码垛完毕,人工扫描托盘条码、货物条码,输入数量,绑定托盘和货物信息。
- 入库记账
入库组盘操作完成后,根据设定的货位分配原则,WMS为入库托盘分配入库地址,输送系统、堆垛机等物流设备将入库托盘送入已分配的货位,WCS将入库完成信息上传给WMS,WMS自动完成托盘条码信息和货位信息的绑定,从而完成货物信息和货位信息的绑定,自动记库存帐、入库流水帐、货位帐、入库单据帐、作业记录等帐务信息。
# 出库管理
支持各类仓库、各种类型出库作业
出库作业自动分配(优先级算法)
有托盘出库、拆零出库
各种质量状态的自动分配出库
单据、作业状态控制
结合手持业务操作(扫码、确认发货)
出库记账
需要进行货位出库时,从上位信息系统导入订单生成出库工单或者人工录入出库工单,包括需要出库货物的品种、数量、货物状态等信息,出库数据录入完成后,设定库存周转规则、分配出库、生成出库拣选任务、执行自动出库,出库完成自动生成出库流水,更新货物库存。WMS能满足多个品种货物同时出库以及空托盘返库功能。
- 订单管理
拣选出库前,首先要有发货单。发货单是仓库发货的依据,可以是上位信息 的销售订单/发货单,也可以是生产车间或者工程项目的领料单/生产出库计划。
发货单详细记录了每种物资的订货量、批号和目的地、发货时间等信息。这些数据可以通过电子传输或者手工录入进入WMS。
WMS提供对订单的维护功能,包括:从上位信息系统/V1系统导入订单、创建订单、设置订单状态等。
- 库存周转规则设定
分配出库时,遵循一定的规则,称为库存周转规则。通常来讲,仓库在出库时客户经常会有指定的出库要求,例如某个产品要求出指定的生产批号或指定的供应商的货物。但符合要求的货物很可能不止一个批次,或者客户没有指定具体的要求,此时就需要利用到库存周转规则,对符合要求的货物进行排序,然后按一定顺序出库。库存周转规则是用于分配的。在产品出库操作中,每一次分配都会利用到库存周转规则中的设置。由于不同客户用来排序的信息内容不同,而这些内容必须跟踪到库存才能在出库时用来排序,因此这些信息项必须在批次属性规则中维护,而库存周转规则设置时只需指定对应的批次属性规则以及相应排序要求即可。
通常用的周转规则包括:产品先进先出First In First Out(简称FIFO)、产品后进先出Last In First Out(简称LIFO)、先到期先出First Ended First Out(简称FEFO)、指定批号出货、指定货位等。
库存周转规则设定后,分配出库,生成拣货单,根据发货单生成拣货单,并可以用手持终端查询到。
- 拣货
拣货是指按照拣货单的要求从仓库的货位里取出货品准备发货。WMS支持对每个拣货命令依次逐个拣货的方式,也支持波次拣货的方式。拣选指令中包含位置信息和最优路径,根据货位布局和确定拣选指导顺序,系统自动在RF终端的界面等相关设备中根据任务所涉及的货位给出指导性路径,避免无效穿梭和商品找寻,提高了单位时间内的拣选量。
- 离散型拣货
是指仓库人员按照某个单独的指令完成拣货的情况。在这种情况下工人按照指令一样一样地拣取货品。一张订单往往被完整地执行。任务包括拣取这张订单中所有的产品。这一情况并不排除为完成订单而出现的跨工作区域操作的现象。
- 按区域拣货
这种情况是指分配给某个操作人员的拣货任务都限制在其负责的工作区域。所有前述的拣货方式都可以结合应用区域拣货技术。按区域拣货的物资可能需要被整合或分类来使订单集中便于发货,具体取决于客户,生产或发货方面的要求。这一拣货方式在拣货操作因区域不同会受到限制的情况下特别适用,比如:对于需要叉车或机械拣货的区域等等。
拣货任务可以通过RF 或者桌面发布给作业人员,相应的,作业人员可以通过RF 或者桌面汇报拣货完成情况。可以设置一些检查信息,如到货仓位的条码或者校验码,要求作业人员扫描这些信息来确保货物已被正确发出。
# 货物分拣管理
分拣工位分配:采用两种方式,分拣工位绑定任务和随机选择。
出库物料在分拣货位上等待拣选,并在每个拣选工位的电子标签LED显示屏上显示拣选数量;输送机根据事先分配的分拣工位,自动将需要分拣的周装箱自动推出输送链到分拣工位,在分拣员根据工位显示屏提示数量取出货物后按键确认,按钮控制直接将周装箱送回传输链自动运行到下一个拣选工位或订单拣选完毕直接返。
分拣工位和输送机的高度符合人体力学原理,分拣工位下面设置周装箱存放工位。
- 生成分拣任务
系统自动计算生成出库任务、分拣任务。分拣货物来源于立体仓库内的货物。
出库任务包括:整托出库任务,补货出库任务,空托盘出库任务。WMS将各出库任务下达给WCS系统,WCS指挥各物流设备将出库托盘送至托盘拣选位,供电子标签拣选货位补货;空周转箱上线后,输送系统将其送至拣选工位,系统自动为每一个空周转箱计算出所放货物信息;拣选人员按照电子标签提示,将托盘上的货物,放到空周转箱内进行下一步的分拣。
- 手工任务绑定
WMS提供手工为每一个分拣工位绑定分拣任务的功能,分拣前,操作员为每一个分拣工位绑定分拣任务。主要信息包括:分拣任务号、货物编码、规格型号、数量等信息。并能对绑定的任务进行取消、更改等操作。
# 货物质检管理
质检前,先建立质检单。
仓库设置检验区。在该区域内对货物的尺寸、外观等属性作检验;物流设备将货物送至待检工位,能实现随机抽取库存货物的功能,同时抽样检验后的货位能实现返库操作,具备货物信息修改或不合格货物的封存功能、和样品出入库的功能,并具备对抽检结果记录的功能。
系统具备质量追溯的功能。此环节的数据准确性与之前的各种操作有密切关系。可根据各种属性如生产日期、品种、质检人员、批次等对相关产品的流向进行每个信息点的跟踪;同时也可以根据相关产品属性、操作点信息对产品进行向上追溯。信息查询与分析报表在此系统基础上,可根据需要设置多个客户端,为不同的部门设定不同的权限,无论是生产部门、质检部门、销售部门、领导决策部门都可以根据所赋权限在第一时间查询到相关的生产、库存、销售等各种可靠信息,并可进行数据分析。同时可生成并打印所规定格式的报表。
# 盘点管理
所谓盘点,是指定期或临时对库存商品的实际数量进行清查、清点的作业,即为了掌握货物的流动情况(入库、在库、出库的流动情况),对仓库现有物品的实际数量或保管账上记录的数量相核对,以便准确地掌握库存数量。
立体仓库盘点管理分为货架盘点和货物盘点。
货架盘点是指将PLC中的货架表和数据库库中的货架表进行比较,有差异者形成盘点作业下达给WCS,堆垛机自动读取指定货位的托盘号,WCS将托盘号反馈给WMS,以便于WMS修改帐务。
货物盘点是指将数据库中的库存帐和实物进行比较,有差异者修改库存帐,以确保库存的准确性。本WMS的货物盘点功能具备以下特点。
支持指定品种、批次盘点
支持指定货区、货位盘点
支持有托盘及无托盘盘点
结合手持业务操作
盘点记账
在WMS中设置立体仓库内货物的盘点标志,形成盘点作业,下达给WCS系统,堆垛机将盘点托盘取出放到盘点工位,人工进行品种及数量核对,记录盘点结果,堆垛机将盘点托盘送回原位。盘点完成后,根据盘点结果,修改库存帐,记录盘点改帐日志。
# 码打印管理
可根据协议好的条码生成原则生成指定数量的条码,并打印。
# 发货管理
支持对快递公司、发货地、距离、运费单价等信息的维护,并按协议好的计算公式进行运费价格计算。
# 数据查询统计功能
数据查询功能对库存、货位以及作业等数据进行查询和统计。所有查询统计结果均可以导出EXCEL表,也可以打印。
库存查询
按货物信息查询库存
按不同的货物信息(如品名、大小规格、供货单位及特殊条件等)分别或组合查询库存。提供相关货物的库存总量以及明细情况(货物信息、货物数量、存放位置、存放时间等)。
- 按货位信息查询库存
按货位信息分别或组合查询库存。提供相关区域的库存总量以及明细情况(货物信息、货物数量、存放位置、存放时间等)。
- 可用库存查询统计
按照不同的货物信息分别或组合查询统计可用库存。
- 库存安全查询
以对超过安全库存阈值的库存信息(库存量超过上、下限和库存超时)分别进行报警提示。
- 库存明细查询
按照不同的货物信息分别获组合查询统计详细库存信息。
流水查询统计
入出库流水查询
按时间段、批次以及其它货物属性分别或组合查询入/出库流水记录数据。提供相关货物在指定时间段内的入/出库总量以及明细情况(货物信息、入出库数量、存放位置、入/出库时间等)。
- 入出库流水统计
按时间段、批次以及其它货物属性生成系统入出库日报、月报、年报。
货位查询统计
空托盘查询
按货位信息分别或组合查询仓库空托盘。提供相关区域的空托盘总量以及明细情况(存放位置、存放时间等)。
- 空货位查询
按货位信息分别或组合查询仓库空货位。提供相关区域的空货位总量以及明细位置。
- 有货货位查询
按货位信息分别或组合查询库内有货货位。提供相关区域的有货托盘总量以及明细情况(存放位置、存放时间等)。
- 封闭货位查询
按货位信息分别或组合查询库内封闭货位。提供相关区域的封闭总量以及明细情况(存放位置、存放时间等)。
- 问题货位查询
按货位信息分别或组合查询库内问题货位。提供相关区域的问题货位总量以及明细情况(存放位置、存放时间等)。
- 货位综合查询
按照货位状态、托盘号等条件查询各种货位。
- 货架明细报表
提供库内所有货位的状态及相关详细数据。
- 货位状态统计
提供库内各种货位(有货、空托盘、空货位、封闭货位等)的总数量以及比例情况。
各种业务数据查询
销售订单/发货单查询
按照发货单号(销售订单/生产出库计划/领料单)、客户、货物信息等条件分别或组合查询发货单的详细信息。
质检单查询
按照质检单号、检验员、货物信息等条件分别或组合查询质检单的详细信息。
退货单查询
按照退货单号、退货原因、货物信息等条件分别或组合查询退货单的详细信息。
- 作业数据查询
作业队列查询
按照巷道号、层、列、排、托盘号、作业状态等条件分别或组合查询堆垛机未完成的作业情况。在此界面可对作业进行重发、删除、完成设置、优先级设置等操作。
- 作业记录查询
按照完成时间、巷道号、层、列、排、托盘号、作业状态等条件分别或组合查询堆垛机已完成的作业情况。
日志查询
系统日志查询
按照操作时间、操作人员等条件分别或组合查询操作员登录及操作日志。
- 盘点日志查询
按照盘点时间、盘点人员等条件分别或组合查询盘点改帐的详细情况。
- 问题日志查询
按照问题日志产生时间、产生原因、货位地址等条件分别或组合查询问题货位产生的原因。为操作员处理问题货位提供参考。

# 数据维护功能
数据维护功能提供在系统运行出现问题后对库存数据进行人工维护的手段。
| 功能名称 | 功能描述 |
|---|---|
| 盘库 | 可以按货物属性、存储区域、抽样比例等组合设置生成盘库作业,打印盘库作业表,并执行货物盘库作业。 |
| 库存维护 | 在库存数据与实际库存有差异时,由人工按实际库存对库存数据进行修正,以保证库存数据准确和后续作业正常运行 |
| 历史数据 维护 | 在系统长期运行后,对历史记录数据进行备份和清理,使数据库高效稳定运行 |
| 盘盈亏调整 | 可根据实际库存情况对库存台帐的数据进行修改,根据公司要求的盈亏项目记录数据维护日志。 |
| 分析功能 | 提供库存跟踪、物流追溯、操作员工作量评估,设备故障频率分析等分析功能。 |
# 事务处理类功能
在界面上不可见的事务处理功能为系统自动、正常、高效、安全运行提供保证。是系统中最重要的功能。
| 功能名称 | 功能描述 |
|---|---|
| 设备通讯管理 | 实时采集设备运行状态数据,为设备运行状态实时显示和自动作业调度和作业处理提供数据依据;向设备控制器发送自动作业指令 |
| 自动作业调度 | 根据系统作业任务和设备运行状态,自动对作业任务进行智能化调度,实现先出库后入库、按作业优先级执行等调度原则,使系统高效率运行 |
| 自动台帐管理 | 根据入出库数据按入出库原则自动生成系统的入出库作业,并在作业执行完成时自动实时进行台帐维护,保证台帐数据准确性 |
| 与上级信息系统接口 | 从上级信息系统取得入库货物数据和出库任务数据。为上级信息系统提供货物入库/出库、库存等各类数据,仓储现场控制系统能与企业上级信息系统应用接口进行数据端口连接。 |
# LED显示屏功能
LED显示屏主要显示出库信息。
# 无线手持终端功能
WMS采用无线手持终端进行人工组盘、盘库、分拣区出库确认、复核等。
在本系统中无线手持终端主要用于码垛过程中货物信息和托盘号信息的绑定。无线手持终端和计算机管理系统通过无线以太网进行数据交换。
| 功能名称 | 功能描述 |
|---|---|
| 入库组盘 | 人工使用无线手持终端进行组盘,先扫描托盘条码,然后再扫描货位条码或者输入、选择货物信息,完成托盘号和货物属性的对应,实时将组盘数据上传给后台数据库。 |
| 盘库 | 通过无线手持终端扫描货物托盘,根据显示的货物信息与实际情况进行比较盘点。 |
| 分拣区出库确认 | 分拣区货位出库时,逐一扫描出库物料,按“出库确认”键,系统自动记账。 |
| 复核 | 打包区对打包物料逐一扫描与订单内容进行比对复核。 |
# 与其它信息系统接口
- 与上位信息系统接口
基础数据:上级信息系统提供物料信息(物料编码、物料名称、规格型号等)等。
入库数据:上级信息系统提供到入库单信息(入库单号、物料编码、物料名称、规格型号、数量、批次等)。立体仓库信息系统反馈入库单的执行情况。
出库数据:分拣系统提供到出库单信息(出库单号、物料编码、物料名称、规格型号、数量信息等)。立体仓库信息系统反馈出库单的执行情况。
配送发货数据:反馈订单的运费计算结果及发货信息。
- 与WCS接口
WMS向WCS下达作业指令,WCS执行完毕后反馈给WMS,以便于WMS进行自动记账。本系统WMS和WCS实现无缝链接。
# 第八节 自动化立体仓库监控系统(WCS)
# WCS概述
WCS的主要功能是对入出立体库、分拣线的物流进行动态管理与调度,及时、准确完成货物的入出库,同时对物流信息实现与物流的同步管理。系统对入出库作业进行最佳分配、调度和控制,对入出库输送机及堆垛机等各种设备的运行状态进行动态显示及在线监控。自动库存台帐为用户提供准确的库存数据信息。
WCS具备丰富的数据管理和查询统计功能,动态图形显示设备运行状态、各存储区域的货位存储情况。
WCS具有良好的扩充性,和开放的数据接口,能够与其它信息系统进行数据交换。在服务器上能实现远程数据与信息资源及管理共享。WCS具有系统维护、货物管理、数据维护、数据查询、设备运行状态显示、设备远程控制、自动事务处理以及与其它信息管理 系统的接口等功能。系统功能结构图如下:
# 系统功能
# 作业管理功能
作业管理是在系统中进行出、入库等操作的功能。具体内容如下:
- 入库作业
WMS系统将需要立体库处理的入库订单传递给WCS系统,人工组盘码垛完成后,扫描绑定托盘信息,经输送线、尺寸检测、堆垛机等一系列物流设备,按照系统自动分配的货位地址,将入库托盘放入立体仓库,系统自动记入库流水账、库存帐、单据账务等。WCS系统计算并反馈货物入库信息至WMS系统。
- 出库作业
WMS将出库指令发给WCS,WCS指挥堆垛机、输送机等物流设备将出库托盘出到出库口,同时将作业完成信号上传给WMS,WMS系统记出库流水账、库存帐、单据账务等。
- 盘点作业
设置盘点方式,生成盘点单,生成盘点作业,WCS指挥堆垛机执行盘点作业,通过手持终端对实物进行核对,记录差异,并在WCS中修改库存,形成盘点日志。主要盘点方式有:全部、随机、指定品种、指定批次、指定货位、指定托盘等。
- 作业综合调度
WCS具备作业任务优化功能(以提高作业效率为原则),指挥堆垛机等设备作业顺序,提高作业效率。
WCS具备添加作业、修改作业优先级、修改作业状态等功能。
WCS所有人机交互指令(含任务所属工作站信息)应反馈给WMS,由WMS生成作业任务列表,方便人员操作。
# 状态查询功能
状态查询功能对自动仓库系统中的物流设备状态、位置以及作业等数据进行查询和统计。
| 功能名称 | 功能描述 |
|---|---|
| 作业队列查询 | 对堆垛机当前未完成的作业进行查询。包括入库作业、出库作业、盘库作业执行状态等 |
| 作业记录查询 | 对堆垛机已完成的作业进行查询,便于查账处理问题货位。 |
| 报警日志查询 | 查询设备报警。(发生时间、报警设备、报警名称等) |
# 设备运行状态显示功能
以动态图形和数据表格等形式为系统管理员提供系统运行状态及数据的显示。使管理员随时可以对系统的运行状态有明确、清晰的了解。各显示界面之间可以方便地进行切换。
| 功能名称 | 功能描述 |
|---|---|
| 系统运行状态平面显示 | 以俯视角度的图形示意方式显示输送系统的运行和负载状态、堆垛机的水平位置和负载状态以及系统的通讯状态、故障信息等。使系统运行总体状态一目了然 |
| 设备运行故障提示 | 实时对堆垛机、输送机等物流设备运行报警信息进行提示 |
| 设备运行记录查询 | 对堆垛机运行记录(包括故障、报警信息、发生及恢复时间、人工操作发生及恢复时间等)信息进行查询 |
| 堆垛机运行状态显示 | 以侧视角度的图形示意方式显示单台堆垛机的水平/垂直运行状态和负载状态、以表格方式显示堆垛机作业数据、作业状态和故障状态等信息。并带有堆垛机监控手动控制面板 |
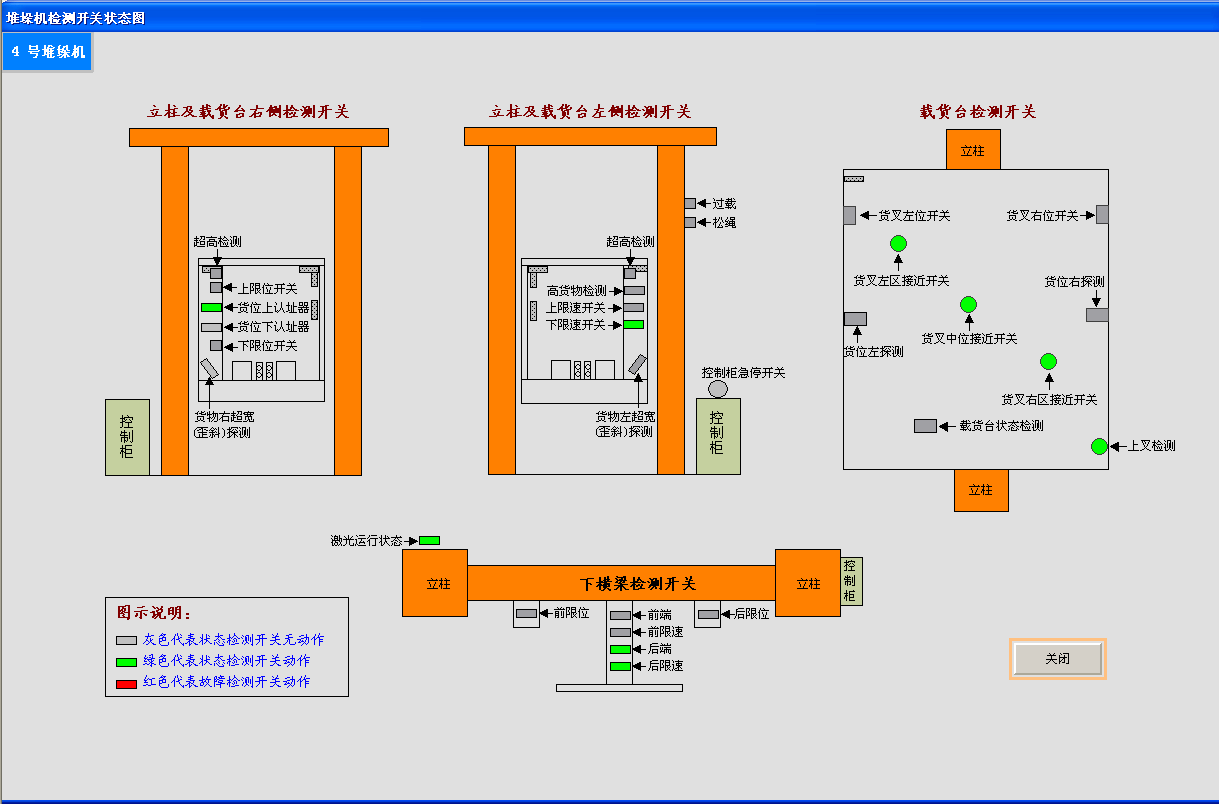
| 堆垛机检测点状态显示 | 以示意图方式从不同方向分别显示堆垛机上所有检测点的状态 |
| 堆垛机运行参数显示 | 以表格方式显示堆垛机运行参数 (有授权的操作员在必要时可以根据设备运行状态进行调整) |
| 堆垛机示教数据显示 | 以表格方式显示堆垛机示教数据,在设备进行维修重新示教后进行数据检验 |
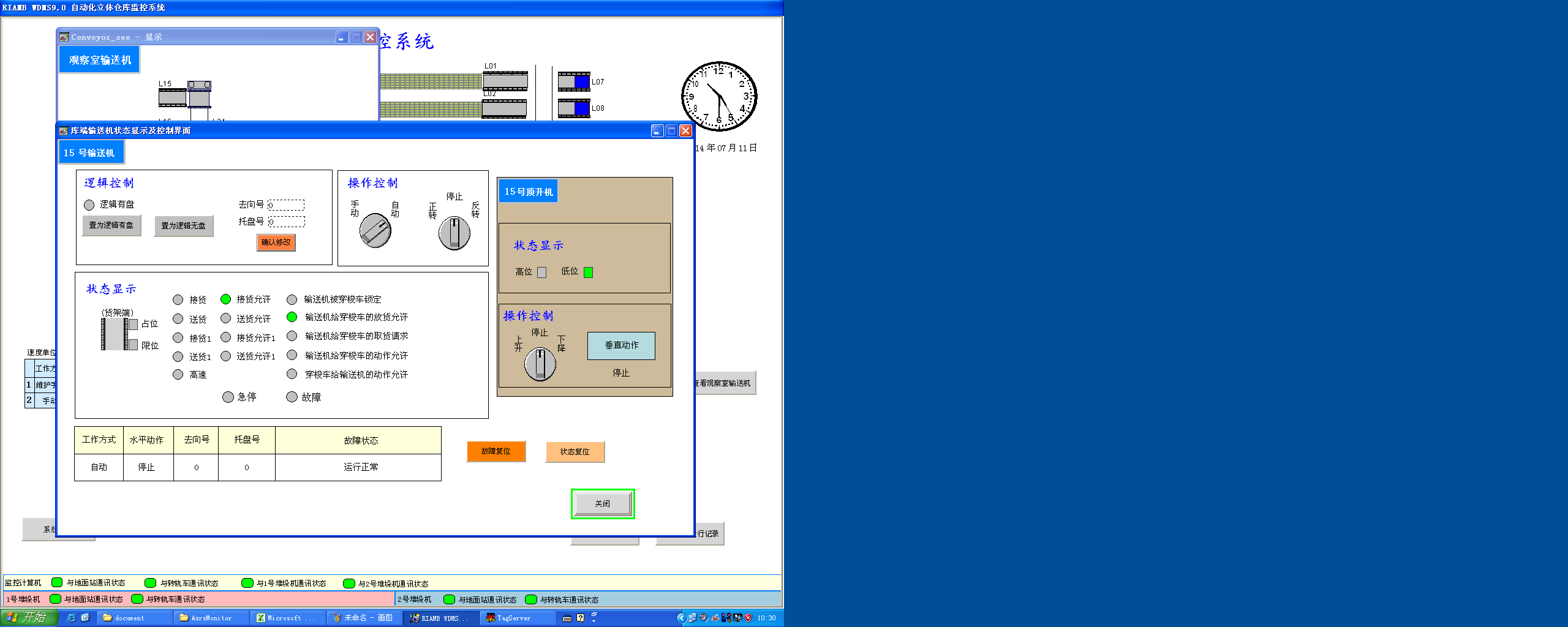
| 输送机状态显示 | 以侧视角度的图形示意方式显示单台输送机状态和故障状态等信息。并带有输送机监控手动控制面板 |
| 输送机监测点显示 | 以示意图方式从不同方向分别显示输送机上所有检测点的状态 |
| 分拣线状态显示 | 以侧视角度的图形示意方式显示单台分拣线状态和故障状态等信息。并带有分拣线监控手动控制面板 |
| 分拣线监测点显示 | 以示意图方式从不同方向分别显示分拣线上所有检测点的状态 |
| 打包配送线状态显示 | 以侧视角度的图形示意方式显示打包配送线状态和故障状态等信息。并带有打包配送线监控手动控制面板 |
| 打包配送线监测点显示 | 以示意图方式从不同方向分别显示打包配送线上所有检测点的状态 |
- 系统运行状态显示
以俯视角度的图形示意方式显示系统的总体运行状态,实时对堆垛机和输送机、穿梭车等物流设备运行报警信息进行提示。并可分别单击某控制设备,以查看相应设备的详细运行状态显示。例如,在自动仓储系统运行状态示意图中单击任一台堆垛机,即可查看此台堆垛机运行的详细信息。
- 自动仓储系统运行状态示意图
显示立体仓库库堆垛机、智能穿梭车、输送机等物流设备的运行状态、水平位置和负载状态,入库、出入库载货平台的运行状态和负载状态,与各控制设备的通讯状态,设备故障信息等。
- 堆垛机运行状态显示
堆垛机运行状态显示单台堆垛机的运行示意图、作业数据、运行数据、故障状态、检测点状态、运行参数以及示教数据等。包括:以侧视角度的图形示意方式显示单台堆垛机的水平、垂直运行位置和负载状态、以表格方式显示堆垛机作业数据、作业状态(包括水平、垂直和货叉运行的速度等)和故障状态等信息。以示意图方式从不同方向分别显示堆垛机上所有检测点的状态信息。以列表方式显示堆垛机详细故障及报警状态信息。以表格方式显示堆垛机运行参数 (有授权的操作员在必要时可以进行调整)。以表格方式显示堆垛机示教数据,可以在设备进行维修重新示教后进行数据检验。
- 穿梭车运行状态显示
穿梭车运行状态显示单台穿梭车的运行示意图、作业数据、运行数据、故障状态、检测点状态、运行参数以及示教数据等。包括:以侧视角度的图形示意方式显示单台穿梭车的水平运行位置和负载状态、以表格方式显示穿梭车作业数据、作业状态和故障状态等信息。以示意图方式从不同方向分别显示穿梭车上所有检测点的状态信息。以列表方式显示穿梭车详细故障及报警状态信息。以表格方式显示穿梭车运行参数 (有授权的操作员在必要时可以进行调整)。以表格方式显示穿梭车示教数据,可以在设备进行维修重新示教后进行数据检验。
- 输送机运行状态显示
输送机运行状态显示输送机的运行示意图、故障状态、检测点状态、水平垂直运行状态等。包括:以侧视角度的图形示意方式显示输送机的水平、垂直运行状态和负载状态、以表格方式显示输送机的故障状态等信息。以示意图方式从不同方向分别显示输送机上所有检测点的状态信息。
- 分拣线运行状态显示
分拣线运行状态显示输送机的运行示意图、故障状态、检测点状态等。包括:以侧视角度的图形示意方式显示分拣线的运行状态和负载状态、以表格方式显示分拣线的故障状态等信息。以示意图方式从不同方向分别显示分拣线上所有检测点的状态信息。
- 打包配送线运行状态显示
打包配送线运行状态显示输送机的运行示意图、故障状态、检测点状态等。包括:以侧视角度的图形示意方式显示打包配送线的运行状态和负载状态、以表格方式显示打包配送线的故障状态等信息。以示意图方式从不同方向分别显示打包配送线上所有检测点的状态信息。
# 设备远程控制功能
可以在设备自动运行故障或必要时(如设备检修、保养)时,在监控站直接对堆垛机和输送机、穿梭车等物流设备进行手动控制,并且在运行状态上可以直观的看到运行情况和状态。
在特殊情况下,必要时(如设备维修)可以在监控系统对设备直接发送作业指令,进行故障处理,或直接手动控制操作设备运行,作为故障处理或和应急作业的手段。
- 堆垛机在线控制
通过在监控界面中直接向堆垛机发送作业指令,即:输入堆垛机作业数据,并用按钮启动堆垛机执行作业。
通过鼠标点击监控界面中的堆垛机手动操作面板,可以进行故障清除、作业清除、自动/监控手动方式转换并直接对堆垛机进行监控手动操作(就如同在堆垛机上使用手动操作面板操作堆垛机一样)。在对堆垛机进行监控手动过程中,可直接观察到堆垛机的相应运行状态。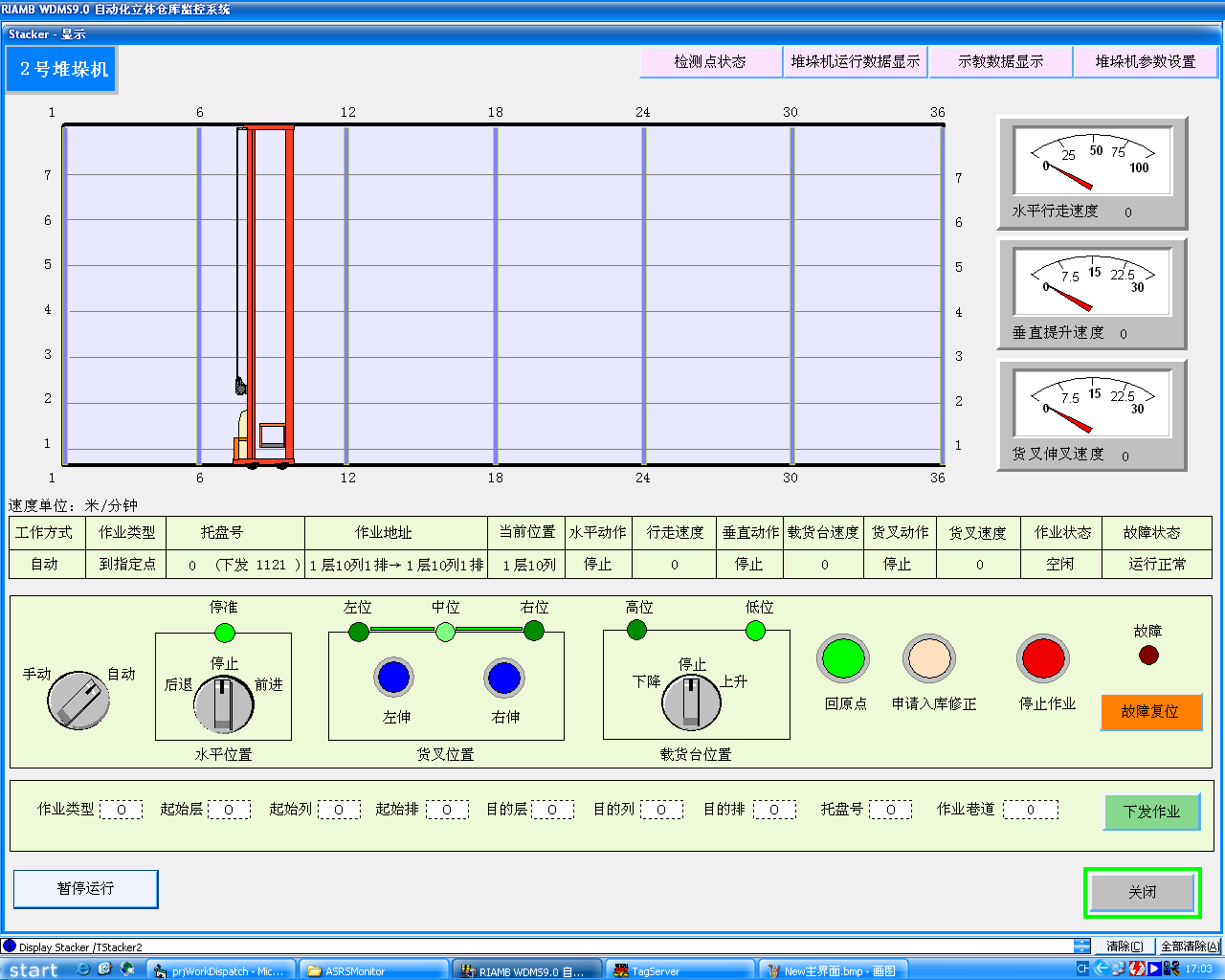
- 穿梭车在线控制
通过在监控界面中直接向穿梭车发送自动作业指令,即:输入穿梭车作业数据,并用按钮启动穿梭车执行作业。
通过鼠标点击监控界面中的穿梭车手动操作面板,可以进行故障清除、作业清除、自动/监控手动方式转换并直接对穿梭车进行监控手动操作。在对穿梭车进行监控手动过程中,可直接观察到穿梭车的相应运行状态。
- 输送机在线控制
通过鼠标点击监控界面中的输送机手动操作面板,可以进行故障清除、设置输送机状态、设置输送机去向、进行自动/监控手动方式转换并直接对输送机进行监控手动操作。在对输送线进行监控手动过程中,可直接观察到输送机的相应运行状态。
- 分拣线在线控制
通过鼠标点击监控界面中的分拣线手动操作面板,可以进行故障清除、设置分拣线状态、设置提升机去向、进行自动/监控手动方式转换并直接对分拣线进行监控手动操作。在对分拣线进行监控手动过程中,可直接观察到分拣线的相应运行状态。
- 打包配送线在线控制
通过鼠标点击监控界面中的打包配送线手动操作面板,可以进行故障清除、设置打包配送线状态、设置提升机去向、进行自动/监控手动方式转换并直接对打包配送线进行监控手动操作。在对打包配送线进行监控手动过程中,可直接观察到打包配送线的相应运行状态。
- 自动作业调度
自动作业调度模块在自动仓储监控机上运行,根据系统作业任务和设备运行状态,自动对设备作业任务进行智能化调度,实现出库优先、按作业优先级执行等调度原则,使系统作业得到高效、准确执行。
自动作业调度模块包含但不仅限于以下内容:
显示物流设备通讯状态(连接正常、连接中断用不同的颜色显示);
显示数据库连接状态(连接正常、连接中断用不同的颜色显示);
显示WMS系统给WCS系统下达的未完成指令,并能对这些指令进行查询、取消、重发、删除、新增、设置完成等;
显示WMS系统给WCS系统下达的已完成指令,可按作业执行时间、巷道、托盘号、作业完成状态等条件进行查询。
# 事务处理类功能
在界面上不可见的事务处理功能为系统自动、正常、高效、安全运行提供保证,是系统中最重要的功能。
| 功能名称 | 功能描述 |
|---|---|
| 设备通讯管理 | 实时采集设备运行状态数据,为设备运行状态实时显示和自动作业调度和作业处理提供数据依据;向设备控制器发送自动作业指令 |
| 自动作业调度 | 根据系统作业任务和设备运行状态,自动对作业任务进行智能化调度,实现先出库后入库、按作业优先级执行等调度原则,使系统高效率运行 |
| 自动台帐管理 | 根据入出库数据按入出库原则自动生成系统的入出库作业,并在作业执行完成时自动实时进行台帐维护,保证台帐数据准确性 |
| 与上级信息系统接口 | 从上位信息导入订单基础数据等;WMS提供入库结果、出库结果、库存、发货信息等。 |
# 第九节 接口系统
9.1 WMS与ERP接口描述
系统特点如下:
ERP系统与WMS系统中都有的基础数据(包括物料信息,BOM信息,供应商信息,客户信息,库位信息等)能实现即时同步。(正常情况下以ERP为主,同步到WMS中)
ERP系统中所有出入库,移库或库存状态改变等移动类型改变的业务数据都能实时同步到WMS系统中。
WMS中仅对基础数据及正常出入库业务可回写到ERP系统中。
提供ERP与WMS系统中库存对比报表,及时发现差异并调整。
提供新增移动类型的业务数据同步配置(ERP中各种移动类型分别对应WMS系统中的入库、出库、移库、在库物料信息变更,今后若ERP系统有新的移动类型,可通过配置实现该业务的相关数据在ERP系统与WMS系统同步,并且在WMS系统中业务数据可自动对应到其中某一类(指入库、出库、移库、在库物料信息变更等)。
在不能与ERP系统正常连接的情况下,WMS可以依照ERP系统操作规范进行基础数据维护,同时也能按照ERP的流程及操作规范建立出入库单据、移库单据、在库物料维护意志,并生成相应作业,待与ERP系统恢复网络连接时,WMS系统中因网络不通才手工创建的主数据和所有单据,以及对已确认并生成的单据做的维护能依照ERP业务操作回写到ERP系统中,并在WMS系统中进行ERP系统与WMS系统的单据关联。
9.2 WMS与ERP接口功能表
WMS与ERP接口满足如下功能表,但不限于此功能表所示功能。具体功能根据双方软件需求报告的最终要求为准。
| 功能名称 | 功能描述 |
| 基本要求 | 在保证系统正常工作的同时,WMS系统必须考虑独立工作与完善接口同步进行的原则。WMS系统在不能取得ERP系统数据或不能正常向ERP发送数据时,WMS系统仍然能够正常工作,并保存未传入ERP的数据,可随时为ERP传输相应数据。 |
| 入库单据同步 | ERP根据系统业务需求生成入库单据,通过WMS与ERP接口系统写入接口表(入库接口表)中,并更新ERP状态表与WMS指令表。WMS系统要根据入库类型自动导入接口表中入库单据数据并更新WMS状态表与ERP指令表。 在不能与ERP系统正常连接的情况下,WMS可以按照ERP的流程建立入库单据,并根据单据进行入库,待能与ERP进行连接时,保留入库数据记录及相关移动类型数据,随时可以通过接口程序传到ERP接口系统中。WMS系统需要在实际作业表中设计有控制状态,在未与ERP交换数据和已经完成ERP数据交换时保存不同的状态值,在对作业表中的数据进行操作时,要根据控制状态区分进行不同的操作。 WMS入库单据处理完成后,WMS回填实际入库信息到接口表,并更新WMS状态表与ERP指令表。 |
| 出库单据同步 | ERP根据系统出库业务,或者根据生产计划需要生产出库单据,通过WMS与ERP接口系统写了接口表(出库接口表)中,更新ERP状态表与WMS指令表。WMS系统要根据出库类型自动导入接口表中出库单据数据并更新WMS状态表与ERP指令表。 在不能与ERP系统正常连接的情况下,WMS可以按照ERP的流程建立出库单据,并根据单据进行出库,待能与ERP进行连接时,保留出库数据记录及相关移动类型数据,随时可以通过接口程序传到ERP接口系统中。WMS系统需要在实际作业表中设计有控制状态,在未与ERP交换数据和已经完成ERP数据交换时保存不同的状态值,在对作业表中的数据进行操作时,要根据控制状态区分进行不同的操作。 WMS出库单据处理完成后,WMS回填实际出库信息到接口表,并更新WMS状态表与ERP指令表。 |
| 库存同步 | WMS根据整个系统库存信息,按照一定的汇总方式,进行库存汇总,并将汇总库存信息自动导入接口表(库存接口表)中,并更新WMS状态表与ERP指令表。ERP通过WMS与ERP接口系统自动读取接口表信息,并导入库存信息,并更新ERP状态表与WMS指令表。 |
| 基础数据同步 | 基础数据包括,类编码字典,子类编码字典,物料编码字典,计量单位字典,仓库编码字典,库区编码字典,货位编码字典,客户信息字典,生产线信息字典等等系统基础数据字典。 ERP系统与WMS系统网络连接成功时,ERP系统通过WMS与ERP接口系统将各种基础数据字典自动写入相应的接口表中,更新ERP状态表与WMS指令表。WMS系统初始化时,自动根据系统需要导入所有基础数据字典,并并更新WMS状态表与ERP指令表。 如果ERP新增数据字典,ERP自动写入数据字典信息到接口表,更新ERP状态表与WMS指令表。WMS系统自动根据系统需要导入新增基础数据字典,并并更新WMS状态表与ERP指令表。 在不能与ERP系统连接的情况下,WMS系统提供手工维护数据字典的功能,并对手工维护的记录进行标记。待能正常连接后进行核实或者同步。 |
9.3 WMS与ERP接口设计
1、WMS系统与ERP接口设计思想
接口的原则是:WMS系统管理货位、库存,ERP管理基础数据、库存、入出库单据。 在保证系统正常工作的同时,WMS系统还必须考虑独立工作与完善接口同步进行的原则。WMS系统在不能取得ERP系统数据或不能正常向ERP发送数据时,WMS系统仍然能够正常工作,并保存未传入ERP的数据,可随时为ERP传输相应数据。
2、详细设计内容
1)入库控制设计
在WMS系统中入库需要按入库类型(包括生产入库、抽检回库等)、物料库存类型(例如合格、冻结、质检等)进行区分,并将区分结果转换为移动类型,WMS采集产品信息,生成入库作业,完成作业后,WMS系统要根据入库类型、物料库存类型发送相应的指令给接口系统,并将入库数据记录写入WMS接口表,接口系统根据指令将WMS接口表中的数据写入ERP接口表,并更新WMS指令表的状态。
在不能与ERP系统连接的情况下,WMS保留入库数据记录及相关移动类型数据,随时可以通过接口程序传到ERP接口系统中。WMS系统需要在实际作业表中设计有控制状态,在未与ERP交换数据和已经完成ERP数据交换时保存不同的状态值,在对作业表中的数据进行操作时,要根据控制状态区分进行不同的操作。
根据指令调用产品发货单据设计
WMS系统通过无线扫描程序(如果发货单上贴有出库单据条码时,可使用无线手持终端扫描程序取得出库单据信息)或手工处理程序(在WMS系统中输入出库单据号),将出库单据号写入WMS的接口表,并发送相应的指令给接口系统,接口系统根据指令从ERP接口表中取得该出库单据的详细数据回写WMS系统的接口表,并更新WMS指令表的状态。
在不能与ERP系统连接的情况下,WMS系统提供手工输入出库单据信息的功能,并对手工单据进行标记。
2)出库控制设计
在WMS系统中出库需要按出库类型进行区分(包括产品发货、转储发货、抽检出库等),并将区分结果转换为移动类型,WMS系统要根据出库类型发送相应的指令给接口系统,接口系统根据指令将接口表中的数据写入ERP接口表,并更新WMS指令表的状态。
在不能与ERP系统连接的情况下,WMS保留出库数据记录及相关移动类型数据,随时可以通过接口程序传到ERP接口系统中。WMS系统需要在实际作业表中设计有控制状态,在未与ERP交换数据和已经完成ERP数据交换时保存不同的状态值,在对作业表中的数据进行操作时,要根据控制状态区分进行不同的操作。
3)产品基础数据同步设计
WMS系统可以通过产品入库时的无线扫描程序或手工输入程序(在管理系统输入产品编码)触发产品基础数据的同步,如果在WMS中没有查询到相关产品的基础数据,将该产品编码写入接口表,并发送指令给接口系统,接口系统根据指令从ERP接口表中取得该产品的基础数据回写WMS系统的接口表,并更新WMS指令表的状态。
在不能与ERP系统连接的情况下,WMS系统提供手工维护产品信息的功能,并对手工维护的记录进行标记。
# 第十节 AGV系统
# AGV车技术参数及要求
AGV控制方式:控制台集中调度、监控、管理AGV系统的运行状态
AGV控制方式具备功能:全自动/半自动/手动
通讯方式:无线局域网
AGV导航方式:磁导航
AGV驱动方式:双轮兰差动
AGV承载能力:500kg
AGV自重:500KG(以最终设计为准)
AGV车体尺寸:1500mm×600mm×1200mm(以最终设计为准)
运动方向:前进、后退、转弯
最大速度:直线60m/min
工作速度:直线42m/min
转弯速度:18m/min
导航精度:±10mm
停车精度:±5mm
防碰装置:前进方向非接触式防碰传感器
电池组:镍铬快充电池供电
充电方式:全自动充电器实现在线自动充电
制动方式:电磁制动
底盘离地高度:40mm,(不含毛刷,充电连接器)
工作噪声:≤68db(无警示声时)
输送机输送面高度:满足现场要求
输送机速度:16m/min(与地面输送机速度相同)
# AGV功能和要求
系统管理具有今后增加AGV数量、修改路径的扩展功能。
导引方式为磁导引方式。导引装置布置时充分考虑其稳定性,同时避免对环境设施的损坏。
AGV执行指令过程中发生故障时,系统具备指令的解除和重新分配功能。本功能需由上位人工确认。
配备相应的维护保养工具和设施。
AGV在线运行时,可在AGV监控系统屏幕上实时显示系统工作状态,包括在线AGV的数量、位置、状态等。可对AGV小车运行任务进行实时监控和合理干预、故障提示等。
监控系统与现场情况一致,画面美观。
AGV控制管理系统具备任务的接收和分配,提供和系统集成商的接口,具备多台AGV状态查询、AGV交通管理、充电管理、人工干预等功能。AGV交通管理具备防交通阻塞功能,AGV控制管理系统与AGV单机的通讯采用无线方式,通讯稳定,不存在盲区。
车载显示器和操作面板可以查看AGV工作状态、提示操作步骤和故障信息,可人工设定或修改部分单机控制参数(需权限管理)。
AGV系统灵活先进,可方便的进行业务功能改造和扩展。
AGV系统具备自检测、自诊断、自保护功能,包括电源故障、伺服驱动器故障、充电继电器故障、电池电压过低、路径导引失败、无线通讯中断等。
# 系统及单机说明


# 系统构成
AGV系统由输送AGV车、地面导航系统、自动充电系统、AGV控制台、AGV调度管理系统和通讯系统等构成。
- 输送AGV车:
输送AGV车完成托盘的移载、输送工作。
- 地面导航系统:
地面导航系统是AGV运行的路线和轨迹,AGV的导航系统采用基于地图的磁带导航方法。
- 自动充电系统:
AGV在工位上进行在线充电。AGV的充电过程是在控制台的监控下自动进行的。
- AGV控制台和AGV调度管理系统:
控制台和AGV调度管理系统是AGV系统的调度管理中心,负责数据采集系统的数据处理,与上位机交换信息,生成AGV的运行任务,解决多AGV之间的避碰问题。
- 通讯系统:
通讯系统由无线局域网组成。AGV与控制台之间采用无线电台进行信息交换,通讯协议为TCP/IP协议。控制台可与上位机之间采用以太网进行数据传输。
- AGV系统结构示意图如下图:

# AGV车的构成
AGV是由机械部分和电子部分组成。机械部分包括AGV本体,承载平台、电池仓、控制仓、驱动轮、电池和充电连接器等。电子部分包括AGV控制器,伺服驱动器,运动控制器,无线电台,电源和传感器等组成。

# AGV车的机械结构
AGV车体主架采用高强度钢管和钢板焊接而成,焊后清理、校正、打磨、吹砂后喷漆,油漆附着力强,不易产生脱落、裂纹现象。仓体各面采用钢板焊接成一个封闭的内腔,预留一定数量的排风扇安装孔,用于安装散热风扇。其中仓体的四周有胶条密封,起到很好的防尘密封作用。
AGV驱动轮使用AGV专用驱动轮,该种AGV专用车轮外层使用树脂橡胶材料做成,具有强度高、耐磨损、稳定性高、具有一定的弹性等优点,非常适合于AGV系统的使用,车轮单独组成一驱动机械系,在一个轮支架内安装有伺服电机、减速器、抱闸、旋转编码器机等,车轮结构紧凑、空间占用少、可控性高、性能可靠、维护简单。
# 车用控制器
采用嵌入式CAN总线的主控制器,它是控制系统的核心,它通过接口和各功能模块连结,实时监控各功能模块的工作状态,对异常情况按预定方案进行处理,保证AGV周边设备和人员的安全。该主控制器使用工业级嵌入式主机作为主计算机,在控制器内集成了主板、电子盘、网卡、CAN通讯端口、串口等高速运算主机所需的部件及通讯部件,进行独立封装后制成AGV专用控制器,控制器底部有带有减震器的安装支架。
# AGV车载软件
使用Windows CE操作系统,内部软件包括AGV车体控制嵌入式软件,车体参数文件,车体工具软件,车体运行地图文件,及记录车体运行状态的黑匣子文件。
 AGV车体控制嵌入式软件,是基于Windows环境下编辑的软件,可执行多任务的操作,可进行多窗口的动态观察,并且恢复功能强。在AGV运动的过程中,可通过显示中端,动态的观察AGV的各个设备的工作状态,及位置环的反馈信息。当出现急停停车,通讯中断等故障时,无需重新上线,都可以在故障解决以后立即恢复运行。AGV车体控制嵌入式软件提高了AGV的可维护性,缩短了停线时间。
AGV车体控制嵌入式软件,是基于Windows环境下编辑的软件,可执行多任务的操作,可进行多窗口的动态观察,并且恢复功能强。在AGV运动的过程中,可通过显示中端,动态的观察AGV的各个设备的工作状态,及位置环的反馈信息。当出现急停停车,通讯中断等故障时,无需重新上线,都可以在故障解决以后立即恢复运行。AGV车体控制嵌入式软件提高了AGV的可维护性,缩短了停线时间。
车体工具软件,是AGV调试及故障检修的工具软件。通过AGV工具软件,可以方便观察AGV输入输出的状态,通讯状态等。
车体参数文件,记录了AGV各设备的参数信息。此参数文件可以通过AGV控制台无线传输更改,也可以在AGV上直接更改。
车体运行地图文件,是AGV运行规划的路径信息,随着AGV运行路线的更改,AGV系统只需要调整车体运行地图文件,就可以改变AGV运行的环线,方便易行。
黑匣子文件,记录了AGV运行的各个信息,当AGV出现故障是,通过黑匣子文件,可以很快地查找出故障的原因。
# 电池及自动充电
AGV使用镍铬快充电池作为供电电源该种电池,,AGV可使用专用的充电站停车进行在线充电,补充损失的电量,使AGV在线连续运行成为了可能。
高容量镍镉充电电池作为供电电源该种电池一方面在短时间内可提供较大的放电电流,在AGV启动时可提供给驱动系统以较大的加速度,另一方面该种电池的最大充电电流可达到额定放电电流的10-20倍,使用大电流充电即可减少电池的充电时间,AGV的充电运行时间比可达到1:6-8。
在AGV运行路线的充电位置上安装有地面充电连接器,在AGV车装有与之配套的充电连接器,AGV运行到充电位置后,AGV充电连接器与地面充电接器的充电滑触板连接。整个充电过程是全自动的,整个过程无需人工干预,充电过程中,操作者可正常作业
系统中使用受AGV控制台监控的自动充电机对AGV进行充电,当AGV的电池电压没有通过充电连接器传送给充电机时,充电机不会向外输出电压,可确保在地面的充电连接器在非充电状态时,极板不带任何电压,且充电机的输出采用了对地浮动电动势的差动输出方式,可以确保充电系统及周边人员设备的安全。
# 导航系统
 本项目AGV使用磁导航,在AGV下方装有磁导航传感器,该传感器结构紧凑、使用简单、导航范围宽、导航精度高、灵敏度高、抗干扰性好。磁导航传感器采用CAN总线通讯方式,接线少可靠性高。同时磁导航传感器可以区分出磁场的N,S极,针对复杂的环线应用更为灵活。AGV地标传感器安装尺寸更小。磁导航系统可确保AGV导航精度控制在±10mm内。
本项目AGV使用磁导航,在AGV下方装有磁导航传感器,该传感器结构紧凑、使用简单、导航范围宽、导航精度高、灵敏度高、抗干扰性好。磁导航传感器采用CAN总线通讯方式,接线少可靠性高。同时磁导航传感器可以区分出磁场的N,S极,针对复杂的环线应用更为灵活。AGV地标传感器安装尺寸更小。磁导航系统可确保AGV导航精度控制在±10mm内。
AGV的地面磁导航系统是AGV在运行过程中所能达到的路径,主要由以下几部分构成:运行路径导航线、地标导航线等。运行路径导航线由长500mm、宽50mm、厚度为1mm的磁性橡胶铺设而成,根据路径的具体要求可以进行适当的裁剪。地标导航线由长150mm、宽50mm、厚度为1mm的磁性橡胶铺设而成,在地图上地标是各个站点的标志。在此系统中采用全局导航方式,直线和转弯路段都是通过铺设的磁条来进行导航,此种导航方式导航精度高,AGV不容易偏离导航线。
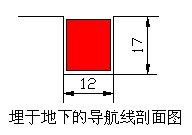

在装生产工艺确定后,为防止导航线的意外损坏,将导航线及地标埋于地下,埋于地下的磁带使用横截面为10mm宽15mm厚的专用磁带,埋于地下后,地表面可以用环氧树脂填平后使用。
# AGV的通信
AGV控制台与AGV间采用无线通讯方式,控制台和AGV构成无线局域网。控制台依靠无线局域网向AGV发出系统控制指令,任务调度指令,避碰调度指令。控制台同时可接收AGV发出的通讯信号。AGV依靠无线局域网向控制台报告各类指令的执行情况,AGV当前的位置,AGV当前的状态。
无线局域网使用工业级专业通讯电台,通讯速度高、抗干扰性好,通讯容错性能高,且通讯电台支持多主无缝方式漫游,在较大的应用空间内有非常好的区域扩展能力。
AGV控制台与AGV间通讯采用
TCP/IP+UDP的模式,通讯中断后不会造成
AGV的死机或死等的状态,当通讯恢复后,
AGV可以自动和控制台建立通讯联系,无需关机重起。
执行标准: 802.11b/g
载频: 2.4GHZ
数据速率: 54Mbps
收发器灵敏度: 72dBm
传输功率: 16dBm
车载天线: 2dB
开放空间通讯半径: 100米
# AGV的安全系统
为确保AGV在运行过程中自身安全,特别是现场人员的安全及各类设备的安全,AGV将采取多级安全措施。
在AGV的前部安装非接触式防碰传感器。一般设置非接触式防碰传感器为两个区域,一个是减速停车区,一个是急停区。当传感器第一区被激活时,首先AGV减速到某一预置的低速,然后在一个较短的距离内停车,当障碍物离开后,AGV车可自动恢复运行;当传感器第二区被激活时,AGV车立即停车,为保证安全,此时需人工按下车上的复位按钮,AGV车才能恢复运行。
在AGV前面板及左右两侧设有紧急停车按钮。
AGV车载控制器的软件还有好多保护措施,我们称作软保护。软保护一般有部件类故障和逻辑类故障。
# 
AGV控制台和调度管理系统 (AGV控制台)
AGV控制台及充电系统电源系统
动力电源: 交流380/220V±10% 50HZ 3相5线
温度: <60℃
湿度: 5—95%
防护等级: IP44
绝缘等级: B级
冷却方式:空气冷却(设备有特别指定除外)
AGV控制台由控制柜、工控机、AP电台、网络交换机及数据采集系统组成,数据采集系统主要用于控制台与总装总控室及其他远程I/O的通讯。
调度管理系统
由于采用集中控制的方式,控制台将成为AGVS系统的核心。它与生产调度管理计算机系统留有接口,可以接受调度命令和报告AGV的运行情况。控制台应满足工业现场环境要求,有足够的运算速度和管理能力。控制台主要功能包括通讯管理、AGV运行状态、数据采集和运行状态显示。控制台在实时调度在线AGV的同时将在屏幕上显示系统工作状态,包括在线AGV的数量、位置(包括AGV处于的地标位置)状态、已完成的数量等。
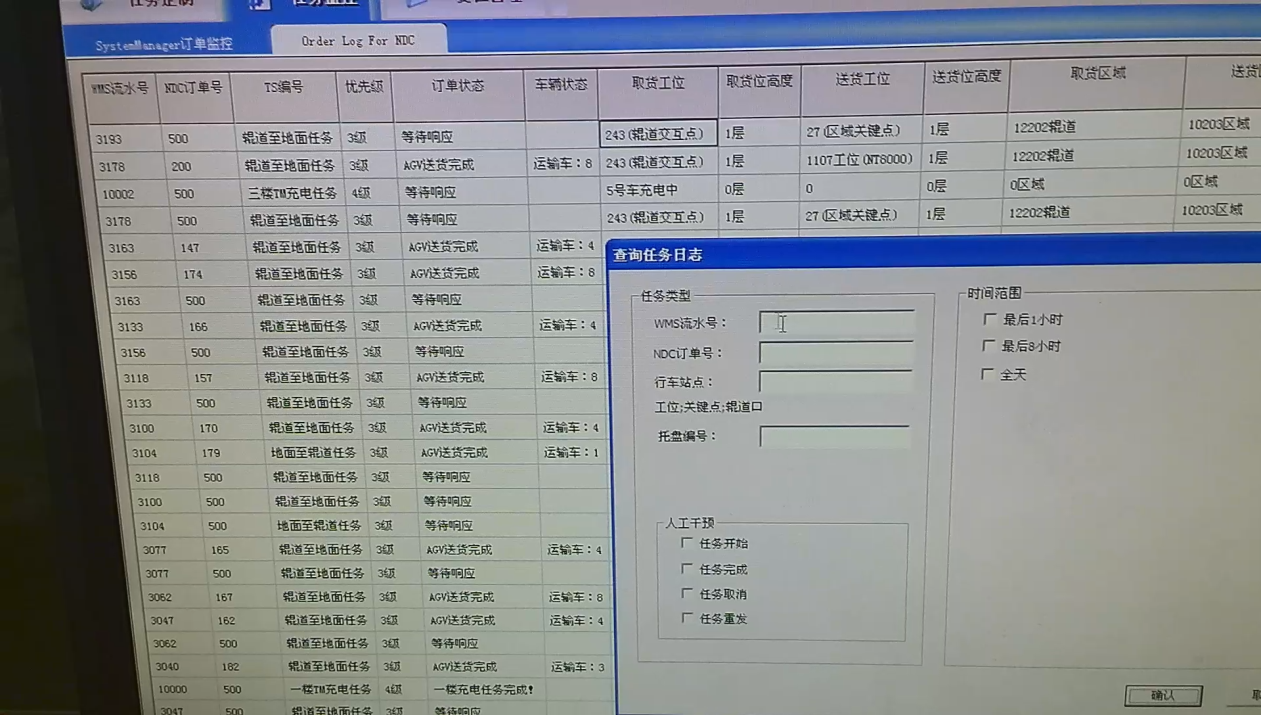
控制台负责AGV运行中的交通管理。保证运行中的AGV与AGV间的最小间距,使其不发生碰撞和AGV追尾等事故,AGV控制台内有避碰参数设置文件,可对不同的区域设置不同的避碰原则,有效控制各种条件下AGV的安全间距。控制台将对进入系统和退出系统的AGV进行管理,以保证系统安全运行。
AGV调度管理系统采用集中调度管理方式,控制台根据生产管理系统下达的运输任务,AGV的工作状态、运行情况,通过通讯系统将命令和任务传递给被选中的AGV,被选中的AGV根据控制台的命令完成工部件的输送和辅助装配。任务完成后,AGV通知控制台任务完成情况,并回到待命位置,等待下一次任务。
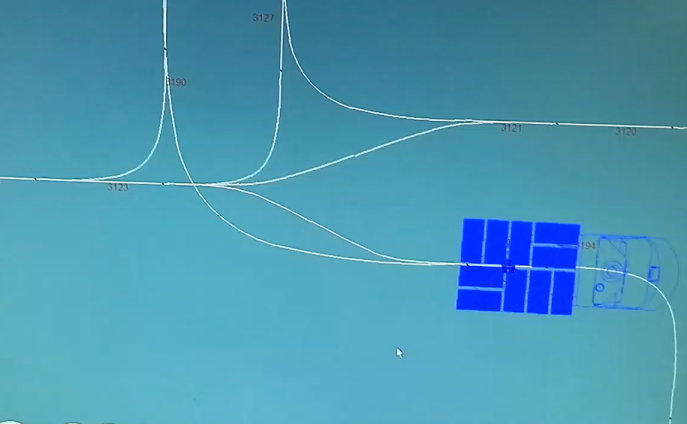
对于需要维修维护的AGV,可由人工操作从生产线的任意点开离生产线,并由人工操作该AGV进入维修区进行维修维护,操作人员只需在AGV或AGV控制台上设置该AGV离线即可,对于维修维护完成的空AGV,控制台可根据系统的实际运行情况选择适当的时间将该AGV自动插入到生产线中。
AGV调度管理系统主要完成下述任务:
任务的接收和分配
多AGV状态监测
多AGV的避碰
充电的控制和监视
# AGV的运行模式
AGV具有手动、离线自动、自动运行三种运行模式。
1、AGV系统的全自动功能
通过中心控制室的监控计算机控制实现全自动的运行。监控计算机将AGV系统作为系统输送机的一部分(移动的输送机)调度所有AGV的运行,完成托盘的出库和入库。AGV系统的任务来源主要有以下几部分:
控制中心,系统用户程序集中自动控制
主机或操作终端指令控制
由监控计算机发出单步调试指令
2、AGV的手动控制

通过连接到AGV上的手动控制装置,操作人员可以对AGV的所有动作进行控制。例如:
左转右转
前进、后退和原地自旋
行走速度的调节
货物的手动移载
3、AGV的半自动控制
AGV的半自动运行有两种模式:
沿着运行路径的手动运行:这种操作模式与手动类似,只是AGV的导航是自动的,沿着铺设好的路径运行,而前进、后退和运行速度是通过手动装置由人操作运行的。这种方式主要是应用于AGV重新上线或当计算机系统出现故障时使AGV继续完成执行了一半的输送任务。
运行内部任务:如果计算机系统出现故障AGV可以执行车载控制器的内部任务,不需要控制台的调度,用于系统的应急处理。
# 运行环境及接口
# 基础要求
1.地面承载能力1.5ton/m2,地面允许压强1.5MPa.
2.地面不平度在2000mm2000mm范围内小于10mm。
3.地面要求能够释放自动导引车静电,绝缘电阻小于108Ω(如无法满足要求,需加装放静电板)
4.使用电源:充电机使用交流电三相五线制供电,线电压380V±10%AC,50Hz,功率为10KW;控制台使用单相电压 220V±10%,50Hz,输入功率1.5KW,单个电台使用单相电220V±10%,50Hz ,输入功率100W
# 信息化接口
1.无线环境:允许AGV系统使用IEEE802.11b标准的一个通道(占用22M带宽)或IEEE802.11标准中的至少三个跳频点(每个频点占用1M带宽)。
2.控制组网:建立任务管理计算机与地面设备之间的控制通讯连接,方式可选(数据库共享、TCP/IP、CAN总线、现场总线)。
3.IP资源:如需AGV系统接入车间网络或IP地址资源必须由业主统一分配,需为每台AGV分配2个IP地址,AGV控制台需分配4个IP地址,所有分配的地址必须在同一局段内。
# 第四章 建筑及公用工程
说明:以上所述仅为自动仓库物流系统及设备,另有与之密切相关的土建及公用工程。这些项目用户需另外联系当地相关部门、机构进行设计、实施。我方可对设计予以协助。
# 第一节 土建基础
土建基础是支撑货架区和库房的底座。库房基础与一般建筑基础相同,它支撑库房以抵御自然荷载(如:风、雪、雨、地震等)和一些临时荷载;货架基础除支撑货架等设备以抵御某些自然荷载(如:地震)外,还要满足在最大载荷下,货架基础地坪的沉降变形小于1/1000(按标准)等要求,因此其基础一般为整体式结构。
本高层货架区的地面强度及基础要求:
| 土建基础 | |
|---|---|
| 单根立柱承受载荷 | 5.5吨(Max.) |
| 货架区平均载荷 | 4.2吨/米2 |
| 货架区货架基础不均匀沉降不大于 | 1/1000 |
| 货架基础表面高低差(全面积)不大于 | 10mm |
| 货架区表层素混凝土的厚度不小于 | 100mm |
货架、地轨同地面的连接采用化学螺栓方式。
另需与业主确定电缆沟或电缆管的布置情况。业主需提供设备安装所需的电、水及存放区域。现场进出道路和存储区域必须拥有足够强度,以使重型卡车、汽车、起重机械及叉车在各种条件下作业成为可能。
# 第二节 能源消耗计算
# 2.1 堆垛机电压能源消耗
能耗是以一个满载托盘入出库一次为基础,进行的平均耗电量计算。
堆垛机的水平电机功率为11KW,垂直电机功率为12.5KW,货叉电机功率为1.5KW。
● 一个满载托盘入库时堆垛机耗电量
水平运行耗电量:0.069Kwh
升降运行耗电量:0.14Kwh
货叉运行耗电量:0.009Kwh
共计耗电量:0.218Kwh
● 一个满载托盘出库时堆垛机耗电量
水平运行耗电量:0.069Kwh
升降运行耗电量:0.14Kwh
货叉运行耗电量:0.009Kwh
共计耗电量:0.218Kwh
因此,一个满载托盘入出库一次的平均耗电量为0.436Kwh。考虑起制动损耗等因素,一个满载托盘入出库一次的平均耗电量约为0.50Kwh。
# 2.2 其它
设备噪音:低于75分贝
电气防护:电机为IP54,现场仪表及传感器为IP65,控制柜及操作盘为IP54
设备表面防护:静电塑料喷涂,涂层厚度60~90um
# 2.3 电力设施
动力电源:220V/380V,50Hz,三相交流电
电压波动:±7%
频率波动:±1%
仪表接地:<4Ω
保护接地:<10Ω
# 2.4 能源消耗分析
以下计算只针对自动化立体库中的自动化设备计算,不含照明等公用设施。
| 一期能耗分析 | |
|---|---|
| 能源消耗类别 | 自动化立体库中能源消耗主要是电力消耗。 |
| 电源要求 | 三相交流电 380V(±10%),50HZ1Hz |
| 装机容量分布 | |
| 堆垛机装机容量 | 25kw/台,4台共计100kw |
| 输送机系统装机容量 | 87台托盘输送机,2台提升机,1台穿梭车共计约90kw 66台箱式输送线共计40kw |
| 计算机硬件装机容量 | 10kw |
| 合计:240kw | |
| 能源实际消耗 | 按装机容量的10%(经验值):240x0.10x8=192度(kw.h)/天(8小时为每天工作时间) |
# 2.5 维修费用分析
质保期内免费维修保养。
| 质保期外每年费用统计 | ||||
|---|---|---|---|---|
| 项目名称 | 维护次数 | 维护人员 | 维护时间 | 金额小计(元) |
| 堆垛机系统机、托盘输送机、箱式输送机系统等机械部分 | 2次/年 | 2人 | 1-2天 | 2000 |
| 堆垛机系统、托盘输送机系统、箱式输送机系统等电气控制部分 | 2次/年 | 2人 | 1-2天 | 2000 |
| 计算机系统硬软件维护 | 1次/年 | 1人 | 1-2天 | 1000 |
| 备品备件更换 | 此项费用为根据经验估算 | 60000 | ||
| 合计 | 65000元 |
# 第三节 消防系统
消防系统是仓库的重要组成部分,根据库存货物消防等级的不同,消防要求不同。消防系统要遵循国家和地方的有关标准和规范。
# 第四节 动力配电系统
供电体制:为确保设备和人身的安全,采用三相供电。用户应确保工作零线N与保护零线PE除在变压器中性点共同接地外,不再有任何电气连接,否则因此造成设备损坏应由用户负责;
中控室电源独立供电,不应与其他电气设备共用;
如果电网供电系统品质较差,应在管理室内设置隔离变压器、交流稳压装置或UPS(不间断电源);
接地措施:单设地线,设备接地电阻小于 3Ω,管理室计算机地线接地电阻小于1Ω,将安全接地和信号接地分开,设备接地安全可靠。
# 第五节 照明
管理室应设有良好的照明,建议采用照明灯;
库前区建议安装照明灯,以便操作及维护人员能正常工作。亮度不得低于300lux;
在库区重要地段设应急照明,亮度不低于150lux。
# 第六节 中控室
使用面积:7.8m×5.4m

室温要求:24℃±4℃
湿度要求:20%~80%(25℃时)
地面要求:管理室应有防静电措施,并预留走线沟管
整个中控室建设及中控室电脑座椅均由买方提供。具体要求如下:
1.中央控制室面积在25~40平方米为宜;
2.中央控制室供电(220V)要求如下:
中央控制室内要安装防静电地板高度:18-20厘米(总高)。
中央控制室内墙上要求有足够的插座满足计算机(含显示器)的220V供电,插座距防静电地板上表面300mm。
服务器电源插座另设,容量3Kw,插座板上配有2个三孔插座,一个20A的空气开关。插座板距防静电地板上表面300mm。
以上电源单独提供,并要求与备用电源相连接,不得随意停电。电源要求有接地,接地电阻不大于1欧姆;
3.中央控制室网络布线要求如下:
预留与公司网络联网的接口。
中央控制室应留有足够的计算机网络接口插座(RJ45)满足4台计算机和2台服务器的网络连接,网络接口要求单独直接与中央控制室的网络交换机(卖方提供)相连
其中4个布置在4处计算机电源插座板旁边,另外2个布置在服务器电源插座板旁边,高度与电源插座板距地的高度一致。
4.中央控制室门窗要求:
要求控制室留有窗户,以利于观察,窗户下边距防静电地板上表面0.8米,窗户建议采用防火玻璃,以达到防火的要求。中央控制室的门要求能进出设备(计算机、家具等);
5.中央控制室的工作温度保持在18~24度,要求配置空调。空调的供电与计算机供电分开;中央控制室的相对湿度要求小于75%。
# 第七节 避雷系统

立体仓库的高度比相邻建筑物一般较高,发生雷击机率也相对较高。倘若没有适当的避雷设备,将会因雷击造成损害:轻则电气设备损毁。重则对建筑物产生破坏,甚至引发火灾乃至人身伤害。
因此应在仓库上方设置优良的避雷设备,以防止雷击造成的损害,如诱电式避雷针、避雷球、低电阻值导线、低电阻值地网等,用以将电流快速引导到大地释放能量。
# 第五章 工程进度及质量保证
# 第一节 工程进度
根据合同总工期的要求制定详细可行的进度计划,并严格控制各工期施工进度,确保工程按期交付使用。
预计项目总工期:合同签订后7个月交钥匙。若因甲方单方面原因影响工期,时间顺延,但必须征得甲方签字确认。
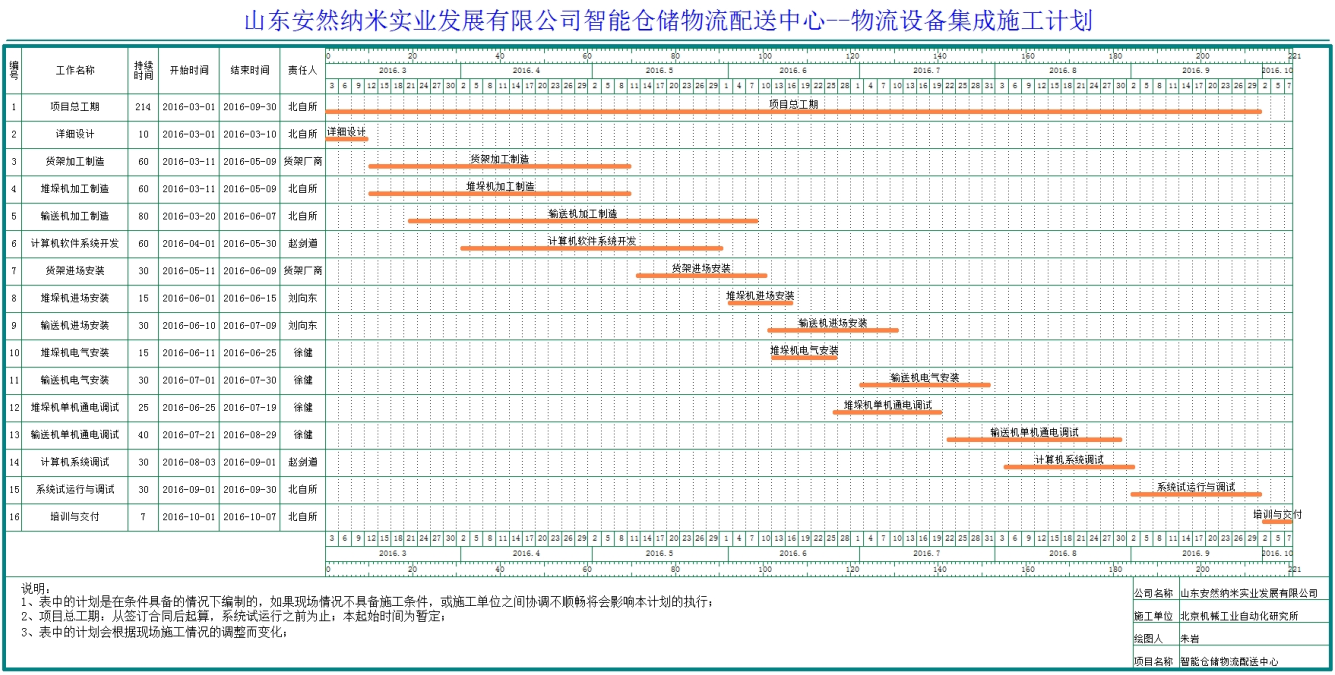
人员安排说明:
自第二项货架进入现场前,我方项目经理根据工程进度就应该进驻现场,与用户一同检查土建基础质量。项目经理应基本一直驻留在现场直到项目验收。
自堆垛机安装调试阶段开始,我方控制系统技术人员应进驻现场,指挥接线工人安装、接线。进行设备调试直至试运行开始方撤离现场,人数为1~2人。
监控管理调试开始前,监控、管理及RF技术人员进入现场,直至试运行结束。人数为1~2人。其间可能有临时替换人员和质量检查人员抵达现场,做短暂停留。
说明:
项目进度必须由甲乙双方按合同以及双方形成的正式文件要求加以保证;
详细工期安排在合同签订后提交用户,确保满足用户的要求;
遇不可抗力因素影响时,项目进度须做相应调整。
# 第二节 项目实施计划
# 2.1系统施工计划流程
# 2.2系统安装施工方法
在现场安装过程中必须重视施工的流程和要点,提高施工精度,这样才能保证立体仓库在交付使用后最大限度地发挥其优势。
自动化立体仓库现场施工主要包括:基础部分、货架系统、天轨及地轨、堆垛机、输送机等周边设备等方面。下面分别介绍其施工要点。
# 2.2.1 基础部分安装方案
基础部分安装的主要工作包括货架和地轨基础板的安装及电气预埋管线的铺设。此项工作一般属土建范畴,由业主负责。但考虑其在立体仓库总体安装质量中所处的重要地位,在基础部分安装时,承建方应派驻技术人员进行现场协调指导,配合土建(业主)完成此项工作。
# 2.2.2 货架系统安装方案
# 2.2.2.1 施工总则
安装施工应严格按图施工。当施工时发现现场和设计图纸有不符之处时应及时提出,经双方批准变更后方可施工。
安装中采用的各种计量和检测器具、仪器、仪表、设备应符合国家现行计量法规的规定,其精度等级不低于安装要求的精度等级。
货架安装前的隐蔽工程应在工程隐蔽前进行检验,合格后方可继续施工。
安装中应进行必要的自检,并作相应记录。
# 2.2.2.2施工要点
(1) 现场查验施工条件是否具备
检查现场和图纸情况是否有出入;通往安装现场的道路是否畅通:现场能否提供永久或临时性的照明设备;现场能否提供永久或临时性的电力供应;现场安全(如不与治安条件冲突等);与其他项目施工是否存在作业冲突;现场屋面及内部粉刷等工程是否已完工,有关的基础地坪、沟道是否已完工,其混凝土强度应不低于设计强度的75%;安装施工地点及附近的杂物、垃圾等应清除干净;埋件或地坪检查验收,如基础采用水平梁或预埋板形式,应查验水平梁或预埋板的布置、几何尺寸和质量要求,应该符合图纸规定,如基础采用膨胀螺栓或化学锚栓固定形式,用水平仪对地坪的施工精度进行测量,对地坪的标高、行、列的直线度进行测量。
(2) 划线定点
如基础采用水平梁或预埋板形式,确认基础无误后可直接进行货架安装。如基础采用膨胀螺栓或化学锚栓固定形式,根据安装基准轴线确定基准点,然后按安装图纸要求进行划线定点。划线定点、钻孔、安装化学螺栓采用激光仪校准。
(3) 安装货架
竖立框架可根据框架高度、重量采用人工(滑轮等)、机械(车吊)等方式。同时配备一定数量的横梁,构成稳定结构。
将头数排数列竖起后,则按图进行方位、尺寸复核,并进行标高、垂直、水平等初步调整,如有其他附件,则逐一配套安装,使各项数据达到标准,然后依排逐列安装。
使用垫板调平时,应符合下列规定:每一垫板组宜减少垫板块数,不宜超过5块,放置时厚的放在下面,薄的放在中间;每一垫板组应放置整齐平稳,接触良好;调平后,每组垫板均应压紧。
安装横梁时必须两头均扣入到位。同时插入安全销。
采用的检测仪器为激光仪、线锤、卷尺等。当货架安装到2/3或1/2时,堆垛机便可进场安装。
(4) 调试货架
应对货架总体进行水平、垂直调整直至符合标准。对合同有要求的应做横梁承重试验,测试横梁下挠度。对有堆垛机安装项目的应做对位试车。对构件表面小面积的漏涂、剥落、磨损应补涂。所有紧固件均应拧紧,螺栓应露出螺母2~4个螺距;沉头螺钉紧固后,沉头应埋进构件内,不得外露。
(5) 交验前准备
做好交验前的资料及各种测量数据的整理及现场清理工作。
(6) 交验
货架安装完毕后,由用户及堆垛机供应商对货架安装质量进行检测,安装人员协助工作。
立体库货架片垂直度验收记录
附表1 单位:mm
 |  |
|---|
| 排 | 列 | 纵向 | 横向 | 排 | 列 | 纵向 | 横向 | 排 | 列 | 纵向 | 横向 |
|---|---|---|---|---|---|---|---|---|---|---|---|
# 2.2.3 地轨安装方案
施工要点为:
根据每个巷道所需地轨长度,确定地轨件数;
将单件地轨按顺序排列在地轨基础板上,对接缝隙应符合焊接要求;
每根地轨应与地轨边距线对齐,并用地轨压板予压紧。地轨压板应排列整齐;
调整地轨侧表面及上表面。上表面由基础板确定,侧表面由地轨边距线确定:
调整地轨侧表面时用大锤或顶丝每隔一段距离敲击地轨,校直找正。校好后的地轨压板必须紧固;
地轨侧表面校直过程中应与标线平行。用500mm钢板尺或激光经纬仪检测地轨直线度;
地轨对接处上表面缝隙电焊,并将上表面、侧表面打磨光滑平整;
用水平仪每隔500mm在地轨全长范围内复测地轨上表面的水平度、不直度。对不符合要求的检测点应重新微调地轨基础板。全面复查地轨压板,紧固螺母;认真做好检验记录,填写地轨检验表格。
立体库地轨安装检测验收记录
附表2 单位:mm
| 验收项目 | 验收标准 | 允 许 值 | 最 大 实 测 值 | 最 大 实 测 值 | 最 大 实 测 值 | 最 大 实 测 值 |
|---|---|---|---|---|---|---|
| XD1 | XD2 | …… | XD15 | |||
 垂直弯曲 垂直弯曲 | 全长 | ±3.0 | ||||
| 堆垛机轮距 范围内 | ±1.5 | |||||
| 接头处两边各0.1m范围内 | ≤0.5 | |||||
 水平弯曲 水平弯曲 | 全长≤100m | ±2.0 | ||||
| 全长>100m | ±3.0 | |||||
| 堆垛机水平导向轮轮距范围内 | ±0.5 | |||||
| 接头处两边各0.05m范围内 | ≤0.1 | |||||
接头水平 错位  | ≤0.5 |
# 2.2.4 天轨安装方式
施工要点为:
按每个巷道天轨的全长,查清备齐所需天轨件数,并按单根天轨孔的连接顺序将各轨
按顺序排列到巷道里:
将单根天轨吊至吊梁下,并将天轨与天轨横梁各连接孔对齐,用螺栓连接;
用经纬仪或铅锤找正天轨与地轨中心线共面,并保证天轨与巷道的对称度尺寸;
测量与找正地轨与天轨的平行度,如不平行则加垫调整,调整找正后,用螺栓紧固,并确保天地轨间距;
天轨安装符合技术要求后,将天轨对接处焊接打磨;
天轨安装符合技术要求后,用经纬仪测量天轨直线度;
认真做好检验记录,填写好检验表格。
立体库天轨安装检测验收记录
附表3 单位: mm
| 巷道 | 水平 弯曲 | 接头垂直错位 | 接头水平错位 | 测点 |
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 |
上下轨道安装偏差验收记录
附表4 单位:mm
| 巷道 | 垂直高差 | 上下 轨距 | 上下轨水平错位 | 测点 |
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 |
# 2.2.5 堆垛机机械结构安装方式
堆垛机是整个立体仓库的核心部分,主要由上下横梁、立柱、载货台、电机减速机、钢丝绳、管理控制等部分组成。
(1)堆垛机的现场安装方式主要有:
整体吊装:先在现场将上下横梁、立柱组装在一起,然后用吊环分别吊上横梁两侧将堆垛机吊起,旋转90°后,送入巷道内。
分体吊装:用吊车或手拉葫芦等起吊工具吊起立柱,然后将行走机构沿轨道推到起吊的立柱下面,用螺栓连接立柱与下横梁。将载货台吊装到位并固定。再吊装另一根立柱并与下横梁连接。最后吊装上横梁并与立柱连接。
(2) 堆垛机现场安装过程需注意如下事项:
要预留足够的安装场地,如库前区没有足够的空间时,要在货架安装到一半左右时开始安装堆垛机,然后再继续安装货架;
立柱起吊并与下横梁连接后,为防止立柱倾倒,下横梁要用千斤顶等支撑固定,上横梁用麻绳与货架固定;
起吊上横梁时,货架顶部要有足够的起吊空间或起吊点,必要时可制作临时起吊支架;
所有立柱与上下横梁和立柱两段间的连接螺栓必须用扭力扳手拧紧,所达到的扭力要求根据设计图纸确定;
立柱和上下横梁紧固后,根据图纸要求详细测量并记录垂直度等各种数据。
堆垛机整机安装验收记录
附表5 单位:mm
| 序号 | 验收项目 | 验收工具 | 允许值 | 实 测1 | 实 测2 | 实 测3 |
|---|---|---|---|---|---|---|
| 1 | 立柱起升导轨对标准水平轨道上平面的垂直度 纵向 | 铅垂 钢尺 | ≤3 | |||
| 2 | 立柱起升导轨对标准水平轨道上平面的垂直度 横向 | 铅垂 钢尺 | ≤3 | |||
| 3 | 上部导轮对导轨的间隙和 | 塞尺 | ≤2 | |||
| 4 | 下部导轮对导轨的间隙和 | 塞尺 | ≤2 | |||
| 5 | 升降导轨接头处高低差 | 目测 平尺 塞尺 | ≤0.3 | |||
| 6 | 升降导轨接头处侧向错位 | 目测 平尺 塞尺 | ≤0.3 | |||
| 7 | 升降导轨接头处接头间隙 | 目测 平尺 塞尺 | ≤0.5 | |||
| 8 | 货叉工作行程 L±a | 卷尺 | a≤3 | |||
| 9 | 双货叉之间 平行度 | ≤1 | ||||
| 10 | 货叉下挠度 | 钢尺 | ≤10 | |||
| 11 | 货叉受阻后摩擦离合器应打滑 | |||||
| 12 | 升降导向轮 对导轨间隙 相对轮间隙 | 塞尺 | ≤1 | |||
| 13 | 升降导向轮 对导轨间隙 同侧轮间隙 | 塞尺 | ≤0.5 | |||
| 14 | 双立柱两起升导轨内侧距偏差 | 卷尺 | ≤±3 |
堆垛机性能参数验收记录
附表6 单位:mm
| 序号 | 验收项目 | 验收内容 | 验收 工具 | 验 收 结 果1 | 验 收 结 果2 | 验 收 结 果3 |
|---|---|---|---|---|---|---|
| 1 | 运行机构 运行状况 | 运行平稳无异音换速无猛烈冲击 | 目测耳听感觉 | |||
| 2 | 起升机构运行状况 | 运行平稳无异音换速无猛烈冲击 | 目测耳听感觉 | |||
| 3 | 货叉机构运行状况 | 运行平稳无异音换速无爬行颤抖 | 目测耳听感觉 | |||
| 4 | 手动额载入库 | a.作业是否准确可靠、方便 b.各个操作器件性能良好 | 操 作 目 测 | |||
| 5 | 手动额载出库 | a.作业是否准确可靠、方便 b.各个操作器件性能良好 | 操 作 目 测 | |||
| 6 | 手动额载复合 | a.作业是否准确可靠、方便 b.各个操作器件性能良好 | 操 作 目 测 | |||
| 7 | 自动额载入库 | a.作业是否准确可靠、方便 b.各个操作器件性能良好 | 操 作 目 测 | |||
| 8 | 自动额载出库 | a.作业是否准确可靠、方便 b.各个操作器件性能良好 | 操 作 目 测 | |||
| 9 | 运行速度高速 | M/min | 卷尺秒表 | |||
| 10 | 运行速度低速 | M/min | 卷尺秒表 | |||
| 11 | 升降速度高速 | M/min | 卷尺秒表 | |||
| 12 | 升降速度低速 | M/min | 卷尺秒表 | |||
| 13 | 货叉速度高速 | M/min | 卷尺秒表 | |||
| 14 | 货叉速度低速 | M/min | 卷尺秒表 | |||
| 15 | 入库作业周期 | M/min | 秒表 | |||
| 16 | 出库作业周期 | M/min | 秒表 | |||
| 17 | 复合作业周期 | M/min | 秒表 |
堆垛机性能参数验收记录
附表6-1 单位: mm
| 序号 | 验收项目 | 验收内容 | 验收 工具 | 允许值 | 验 收 结 果1 | 验 收 结 果2 | 验 收 结 果3 |
|---|---|---|---|---|---|---|---|
| 1 | 起升高度 | 最低标高 Hmin+h | 卷尺 | -10<h<0 | |||
| 2 | 起升高度 | 最高标高 Hmax+h | 卷尺 | 0<h<+10 | |||
| 3 | 停准精度 | 空载行走前进 | 钢板尺 | ±2.5 | |||
| 4 | 停准精度 | 空载行走后退 | 钢板尺 | ±2.5 | |||
| 5 | 停准精度 | 空载升降上升 | 钢板尺 | ±2.5 | |||
| 6 | 停准精度 | 空载升降 | 钢板尺 | ±2.5 | |||
| 7 | 停准精度 | 空载伸叉左伸 | 钢板尺 | ±3 | |||
| 8 | 停准精度 | 空载伸叉右伸 | 钢板尺 | ±3 | |||
| 9 | 停准精度 | 空载行走复位 | 钢板尺 | ±3 | |||
| 10 | 停准精度 | 满载行走前进 | 钢板尺 | ±2.5 | |||
| 11 | 停准精度 | 满载行走后退 | 钢板尺 | ±2.5 | |||
| 12 | 停准精度 | 满载升降上升 | 钢板尺 | ±2.5 | |||
| 13 | 停准精度 | 满载升降 | 钢板尺 | ±2.5 | |||
| 14 | 停准精度 | 满载伸叉左伸 | 钢板尺 | ±3 | |||
| 15 | 停准精度 | 满载伸叉右伸 | 钢板尺 | ±3 | |||
| 16 | 停准精度 | 满载行走复位 | 钢板尺 | ±3 |
# 2.2.6 输送机等周边设备
施工要点为:
查看现场是否具备安装条件;
测量划线。周边设备安装一般在货架、堆垛机安装完成后进行,其测量划线的主要基准为已安装调整好的货架和堆垛机;
组装设备或已组装完成的设备按划线基准进行初定位;
向实际运行过渡。少量任务进行在线实际运行,属于调试的最后进行,其测量划线的主要基准为已安装调整好的货架和堆垛机。
# 2.2.7 调试、测试和试运行
向实际运行过渡。少量任务进行在线实际运行,属于调试的最后阶段。在这一过程中,要进行功能性和完整性的测试。并对系统的缺陷进行必要的修正。
初步验收。系统完成功能性和完整性的测试后,形成实际运行记录。根据最后的运行记录,双方签署初步验收意见。
实际运行,即稳定阶段。该阶段的目的在于使设备稳定工作的同时,让操作人员由感性认识上升到理性认识,并对自己的操作有足够的自信。
实际运行后的故障处理。
最终验收。经过一段时间的稳定运行后,在双方认可的情况下,双方签署最终验收报告,至此,设备安装调试工作完成。
# 2.2.8 软件部分施实方法
1.需求调研和确认
1)确定WCS等系统的详细需求。
2)生成详细需求文档,形成初步开发报告。
3)详细功能说明文档。
4)软件系统各个接口详细需求。
5)客户系统功能和详细开发计划确认。
2.系统开发和工程设计
1)WCS等系统详细设计。
2)各个子系统根据需求调研报告进行详细设计。
3)各个子系统详细开发。
4)各个子系统开发单元模块,并形成软件系统基本框架。
5)软件系统总体集成开发。
3.系统调试和系统测试
1)系统有效性测试计划。
2)单元测试确认程序。(图表,BOMS,软件模块)
3)软件系统单机调试,信息流模拟调试。
4)单元测试确认报告。(图表,BOMS,软件模块)
5)系统BUG测试。
4.软件系统验收
1)系统功能模块验收。
2)软件系统验收有效测试报告。
3)软件系统开发文档验收。
4)软件系统操作和维护手册验收。
5)软件系统整体联机自动运行验收。
# 2.3系统工程管理组织机构
# 2.4项目报告
各职能部门在项目实施不同阶段均应提供项目报告,并由项目经理汇总整个项目的项目报告,向总经理汇报。
月进度报告主要内容为:项目总结、安全、材料管理、设备制造和交付,工程进度和预算质量,工程变更等情况。
周进度报告主要内容为:安全综述(事件汇报和跟踪返馈)、简单作业叙述、重要节点进展完成情况、工作完成情况、未完成计划补救措施、下周工作计划、人员安排等。
日工作报告主要内容为:劳动力、安全、材料设备、采购、到货、制作进度及其它重要情况。
工作竣工报告:在工程验收前向业主提供项目竣工报告。
# 2.5工作控制许可计划
在项目施工及安装过程中,实施工作控制许可计划,实施每天的作业,其主要包括:
# 2.5.1焊接许可计划
施工小组向项目安全经理提出动火焊接申请(电焊、气焊、气割、明火加热等)。
(1)安全经理按业主要求填写临时动火焊接作业申请表。
(2)向业主提供焊工特殊作业操作证,并经验证及加具意见。
(3)由业主审查批准,开具临时动火作业许可证。
(4)动火证应悬挂在动火作业点以便现场检查,必须派人到动火现场监护。
(5)动火作业区域内必须清理易燃、易爆物品,并配备有效的足够数量的灭火器材。
(6)动火作业完成后应对现场进行检查,确认无残留火种后才能离开。
(7)电焊操作时应按以下操作指导书进行。
# 2.5.2供应商进入许可计划
(1)进场施工须到业主保卫科办理“临时出入证”手续并签定有关合约。
(2)签定《外单位人员在甲方公司施工治安保卫、安全生产、环境卫生合约》。
(3)施工现场须由施工单位围闭,做到文明施工,垃圾及时运走并不能洒落,以免影响公司环境卫生。
(4)工作区域严禁吸烟,不在指定场所以外的地方吸烟。
(5)进入施工现场须佩带“临时出入证”及安全帽。
# 2.5.3工作许可计划
(1)编制周及日工作计划,并经业主认可。
(2)严格按工作计划施工。
(3)班后、节假日加班须办理加班申请手续,经业主审批后方可施工。
# 2.5.4限制区域进入许可计划
工程要求需进入非施工区域,须向业主办理进入许可申请。
严格执行操作规程,不准进入危险施工区域。
施工人员只能在施工范围内施工,不准到处乱走,不准进入生产现场。
施工人员食宿自行解决,不要在公司内留宿,不要在公司饭堂内就餐或在公司内开火做饭。除急病或工伤外,不要随意在卫生所就诊。
要按指定卫生间使用,并注意清洁卫生。
# 2.5.5 材料、工具进入许可
编制材料发货计划,并经业主认可。
按照材料发货、到货计划,实施材料进入许可管理。
由于工程及计划变更,更改到货计划,须经甲方同意。
安装工具进入施工现场,须到甲方保卫科办理登记手续。
材料、工具出厂时须到甲方保卫科办理出厂手续。。
# 2.6工程安全计划及控制措施
由项目经理指派专人担任项目质量安全经理,并配备一名专职安全主管全面负责工程安全措施。
建立安全、消防、卫生的预警机制,按照业主有关的《安全、消防和保卫指导手册》要求,制定安全计划书,并将在工程实施全过程按计划书认真执行。
详见《健康、安全计划书》。
# 2.7工程物流和物料管理
物流管理系统主要包括:收据、检查、保管、危险说明、安装问题、物品清单、库存品等。
# 2.7.1入库检查工作
开箱检查
- 制定开箱检验方案,落实检验措施。
- 应在开箱前按合同规定确定是否由供货厂商、业主代表参加,对于国外供货的设备还需与海关、商检等部门确认开箱检验日期,共同参加。
检验要点
检查包装物的标记是否符合合同规定。
根据装箱单、图纸和有关资料核对数量、规格、型号、核对主要结构尺寸和安装尺寸
检查设备的外表质量有无碰伤、机械损伤、锈蚀、积水等。
检查并核对到货设备及其附件、备品备件、附属机具的数量是否与发货单一致,并检验其完整性(附开箱检验单)。
检验合格产品的入库
- 检验合格的材料、设备交付仓库保管、填写“入库单”并附检验记录。
检验后不合格设备的暂存
- 经检验发现有问题的材料和设备,在未进行处理之前一律认为属于不合格的设备,不得办理入库手续,按暂时保管的办法,按未检设备存放,并挂牌标识。
# 2.7.2保管要求
为了对材料进行有效管理,首先应根据实际环境状况对仓库进行库区货位的划分,使同一类材料在同一库区,同批材料在同一货位,在此基础上,由计算机对库区、货位存储的材料进行统计、查询、管理工作。
对于在露天存放的货物,要求对机组及壳体所有的进出口、接管法兰口涂黄油,用盲板或油毡封孔,防止潮气、污物进入,并应采用塑料薄膜覆盖,尤其要注意轴端应涂工业凡士林,单独用塑料纸、油纸或防潮纸包好,注意防尘、防雨。
# 2.7.3设备出库管理
设备出库必须有工程施工计划部门签发的“设备出库单”方可办理设备出库业务,其出库程序为:
- 仓库管理人员应认真审核“设备出库单”,查看手续是否齐全,核对印签,然后按“设备出库单”上所列出的内容发放。
- “设备出库单”不能有涂改,不能用白条子领料。
- 设备发放时;按照设备说明书与装箱清单进行开箱点交,在数量品种及外观无误情况下,发方与收方在“设备出库单”上签证。
- 发放贵重物品、危险品时,必须严格出库手续。
- 设备出库完毕后要建立台帐,仓库保管人员应定期进行库房盘点,填写设备入、出库统计报表,保证帐、卡、物、资金四对口。
# 2.7.4 安装问题
安装现场按业主要求,物料合理调派,向现场发运的预制作、标准件发至指定场地,存放量不大于一天的使用量。
包装与存放
- 设计部门负责制订物流及涂装设备的包装技术条件,设计包装箱图样。
- 包装发运按包装图样及技术条件要求,由生产科负责出厂产品的包装。
- 箱装物品在箱内应相对地固定,防止运输中碰撞损伤。箱内应附装箱单和产品合格证明,箱外应有标识,如“防潮”、“防火”、“小心轻放”、“不许倒置”及收发货单位、地址等。
- 据技术要求合理选择包装方法和包装材料。
- 包装注意保护材料表面不受损伤,材料外形不变形。
- 包装的间隙应充分保证物件不相互碰刮,各种框架包裹应牢固且便于吊装。
- 包装应考虑运输方式和气候影响,有针对性的加于防护。
- 对标志、包装好的材料进行合理的存放,下垫上盖防止变形和损伤、锈蚀、丢失、错乱等。
运输
- 合理选择运输工具和吊具,以减少吊装和运输中的意外事故。
- 分批运输物件,减少错乱和丢失,确保物件状态良好。
- 装运时注意先后顺序,先装重件、大件及不易变形的物件,再装小件、轻巧和易变形的物件,物件间应用纸板、木板加以垫隔。
- 装好后应确保物体的稳定性,用纸板塞紧间隙,用绳索缚紧物体,防止物体窜动和晃动而造成损伤。
- 注意气候影响,采取防护措施。
- 物件卸载时应采取保护措施逐次卸下物件并合理堆放。
装运
- 工艺工装科负责编制通用产品的搬运作业指导书。
- 各车间在生产过程中搬运产品,应根据产品大小、轻重等特点分别采用吊车、铲车、有轨平车、手推(拉)车等运送。运送时,应轻提轻放,防止碰、撞、摔、挤、擦等现象,以免损坏产品已加工表面及导致产品发生变形。
- 在搬运过程中要注意保护产品标识和有关检验、试验状态标记,防止丢失或被擦除。
- 对易燃、易爆和有毒物品的搬运,应遵照有关规定在专人监护下进行。
- 搬运人员(包括铲车司机)应按TQCP18.1-2000《职工培训程序》规定,经培训掌握了装、吊、铲、运等搬运规则和操作技术,经考核合格后方可上岗。
贮存、防护
物资和产品分类分库贮存、防护。
- 各仓库应做好产品(物资)的防护工作,并按规定定期检查库存物资状况,采用适当的防护。如发现物资损坏应及时隔离,并报告部门主管,予以处理。
- 各仓库应坚持物资凭质检科检验合格的证明验数入库,并登帐、立卡,做到帐、卡、物三相符。在发料时执行物资先进先出的原则,避免长期保管带来的损失。
交付
- 事业部按项目设备清单,编制发货清单,组织领料和办理出厂手续。
- 检验员复验待运产品,如发现有质量问题应立即通知有关责任部门负责排除。
- 发运人员整理发运清单,核实发运零、部件和物资,交运输人员签收。并保证运送的产品质量不受损失。运输人员将货物送达目的地后,必须带回项目负责人收据。
- 设备、材料运抵现场后,先存放在预先划定的临时存放地点,由库房管理人员写出接收报告,并安排挂牌标识,准备入库前的检验。
- 设备、材料的入库前检验由现场项目施工经理组织,会同有关采购人员和用户代表参加。
- 外观检查。检查设备、材料的规格、尺寸、型号是否与合同、图纸及铭牌相符,检查有无损伤、变形、开裂、锈蚀和积水等现象,并按规定表格作好记录。
- 清点数量。根据装箱单发明细清单,清点核对到货数量是否齐全、完整,并按规定表作好记录。
- 核对所附文件资料是否与定货单(合同)的要求一致。例如装箱单、发货明细清单、产品和合格证、安装使用(维护)说明书、随机竣工图纸、材料试验报告、检查记录、无损探伤检验报告、热处理记录、性能试验记录等。
- 对于国外供货的设备、材料入库前的检验工作,应在开箱前与供货商、海关、商品检验局等部门联系,确认开箱检验日期,共同参加检验。
- 经检验合格的设备、材料由检验各方在开箱检验记录表上签字确认。由交付方填写入库单并附检验记录。入库单经库房管理人员验核并签字之后,该设备、材料则予以入库。
- 经检验不合格的设备、材料应填写设备检验问题处理情况表,并按规定程序
- 同有关责任方联系,待问题逐一处理完毕,再次检验合格方可办理入库手续。
# 2.8工程安装管理
# 2.8.1制定现场施工安全计划
编制项目施工安全手册,规定通用的施工安全管理程序和安全操作规程,在具体项目施工时,要编制施工安全管理计划。
审查项目施工的安全管理标准、程序、组织机构、职能分工、安全手册和安全计划。
监督施工人员认真执行安全标准、安全计划。
# 2.8.2制定物流计划及安装计划
编制项目发货计划及安装计划。
按照安装计划及发货计划,组织材料、设备的运输、存储。
# 2.8.3 制定现场质量计划
项目质量工程师对项目的设计、采购、施工和调试全过程的质量负责。
项目质量经理管理施工质量报告,进行施工质量事故的分析,并提出处理意见。重大质量问题需向项目经理和公司汇报。
对施工过程进行监控:
控制施工安装进度、施工变更
控制材料和资金使用
记录施工日记和项目经理月报表
检验和实验
对采购的材料和设备进行检验
对施工安装过程和阶段成果进行检验和验证
对工程项目进行最终检验和实验,并作为标识和记录
项目经理作为施工监督与费用控制。
负责施工安全与保卫监督检查,制定安全保卫规章制度,发生安全事故立即报告、迅速处理。
负责机具、设备的使用,确保施工进度和制作质量。
负责施工人员生活、休息等临时设施的安排。
制定现场文件控制计划。
现场安装资源配置。
# 2.9工程文件递交
我公司提供与本项目有关的所有详细技术资料和图纸,供业主查阅。工程结束后应整理出完整的图纸资料给业主。同时在工程各个阶段向业主提交各种技术文件,所有递交文件的数量、格式、大小、必须按照下表中的要求(包括但不限于)。所有文件必须是中文。
| 文件名称 | 电子文件 | 硬拷贝(套) | 规格 |
|---|---|---|---|
| 报价阶段 | |||
| 报价文件 | 是 | 4 | A4 |
| 同步设计阶段 | |||
| 设备功能图及文件 | 是 | 4 | A1 |
| 总体布置图 | 是 | 4 | A1 |
| 深化设计阶段 | |||
| 设备功能图及文件 | 是 | 4 | A4 |
| 设备制作图 | 是 | 4 | A4 |
| 项目管理 | 4 | ||
| 进度表 | 是 | 1 | A4 |
| 项目实施计划 | 是 | 1 | A4 |
| 质量控制计划 | 是 | 1 | A4 |
| 现场物流计划 | 是 | 1 | A4 |
| 劳动力计划 | 是 | 1 | A4 |
| 会议纪要 | 是 | 1 | A4 |
| 竣工报告 | 是 | 4 | A4 |
| 材料测试报告 | 是 | 1 | A4 |
| 最终递交文件 | |||
| 培训手册 | 是 | 4 | A4 |
| 操作手册 | 是 | 4 | A4 |
| 维修手册 | 是 | 4 | A4 |
| 设备清单 | 是 | 4 | A4 |
| 备件 | 是 | 4 | A4 |
| PLC程序 | 是 | 4 | A4 |
| 系统参数表 | 是 | 4 | A4 |
# 第三节 质量认证体系
北京机械工业自动化研究所于2000年通过了国标GB/T19001-2000(ISO9001-2000)和国军标GJB9001A-2001的认证。
 |  |  |
|---|
我所坚持的质量方针是:
# 3.1健全的质量保证体系
北京机械工业自动化研究所用ISO9001标准贯穿于合同执行的全过程,从方案设计、合同评审到施工设计,从制造、外购、检验、到运输、安装,从售后服务到市场信息的反馈,建立内部质量跟踪和反馈措施,严格执行相关标准的要求,把质量第一落在实处。
# 3.2优秀的技术队伍
北京机械工业自动化研究所广纳贤才,聚各类专业优秀技术人才于一体。重大项目由具有丰富经验的高级工程师负责完成设计。用“团结、高效、求实、创新”的企业精神激励优秀工程师们充分发挥聪明才智和主观能动性,使设计工程能满足客户最终要求。
# 3.3密切的涉外交流
北京机械工业自动化研究所是美国Rockwell、德国SIEMENS、法国Schneider等众多国际知名公司授权的自动化系统集成商。可以得到其直接的技术支持和及时、周到、满意的售后服务,以保证各立体仓库项目中关键元器件、部件和设备的质量。
| 合作伙伴 | ||
|---|---|---|
 | |  |
 | |  |
# 3.4强劲的综合加工与配套能力
优良的工程来之于优良的设计、优良的制造、优良的采购和优良的安装调试。各类构件与零件的专业制作、良好的设备和精湛的技艺为合格的产品提供了可靠保证,将质量控制在设计制造之中。重点工程的设备可优选技术先进、价格合理的国外公司配套。使立体库系统在使用中能有效降低故障率,最大限度地提高使用频率和延长使用寿命。
# 3.5先进的设备资源
北京机械工业自动化研究所建有NCRC-MA制造业自动化国家工程研究中心——物流系统仿真与集成实验室,配备了多种品牌、型号PLC、变频器等设备仪器;拥有用于装配控制台、控制柜和模拟调试的装配与调试车间。
# 3.6熟练的工程安装队伍
北京机械工业自动化研究所拥有一支专业技术全面、能力强、经验丰富的工程安装队伍。
# 第四节 质量保证措施
在工程项目实施过程中,北京机械工业自动化研究所严格执行国家有关技术标准,按照合同中的各项技术质量要求,制定并逐一落实各项措施。我们承诺提供的产品是原装崭新产品,确保交付给用户使用的是优质工程。
# 4.1科学的组织管理
1)采用工程总承包或工程分包“交钥匙”方式。
2)设立项目经理,负责质量监督、计划进度、与各分包方协调工作。
3)设立专家组:负责方案设计的评审,仓库设备设计图纸、选材、制造和安装工艺以及调试大纲的审核,制定验收方案,对工程中的重大技术问题做出决定。
# 4.2方案设计的质量控制
项目由经验丰富的工程师负责方案设计。
由专家组进行方案设计的评审,审查是否执行了相关标准,是否满足技术要求,并与同类先进实例进行比较,保证提出的方案应是适合用户的具有最佳性能价格比的优化方案。
# 4.3对采购产品的质量控制
所有需要采购的产品均要选用经审批的合格的分承包方和供货商提供的产品。
所有需要采购的产品均要进行进货检验和现场检验,并保存检验纪录备查。
采购的配套件(如:电机、变频器、可编程控制器等)的合格证、说明书等资料,作为质量证明文件和技术文件交于甲方。
# 4.4生产、安装过程的质量控制
对于生产的设备,按ISO9001的要求对制造、安装、调试全过程进行质量控制,不合格产品作出标记不得进入下道工序。出厂产品均需检验合格后才准许包装发货。
所用材料、元器件严格按设计图纸执行,材料、元器件的代用必须经过审批,代用品不得低于图纸要求的性能。
对分承包方提供的产品,在开始生产前和最终安装、检验时,我方均要派人到分承包方生产现场和安装工地进行交流、指导、监督和验收。关键产品用户可派员一同监督验收。达不到产品技术标准的产品不得出厂发运到安装现场。
# 4.5产品包装、贮存、发运、交付的质量控制
项目经理根据合同要求及国家有关标准,按照产品的结构、性能、技术要求和运输、贮存条件,制订产品包装的具体要求和规范。
包装人员要严格执行规范,产品包装时,认真核对物品,清点数量,做好记录,包装好的产品要按规定做好防潮、防雨、防震等标识,保证产品安全。
产品贮存要能满足对防护的要求,如防潮、防雨、防晒、防腐蚀等。
产品运输,选择有履行合同能力的可靠的运输机构承运。
对所有交付的产品,与用户办理责任清楚的交接手续。
# 4.6质量保证期及售后服务
项目的质量保证期为设备验收后2年,自交验合格交付使用之日起计算。。
1.质量保证期内的服务
在质量保证期内,北京机械工业自动化研究所对系统及设备提供无偿售后服务。系统出现任何质量问题,北京机械工业自动化研究所提供无偿维修服务。在质保期内将配合业主对设备进行经常性的检查和保养。
设备若发生故障,北京机械工业自动化研究所承诺在接到故障报告后2小时内提供免费咨询服务、指导甲方维护人员接触故障。若不能解决,24小时内派遣技术人员到现场解决问题。如属质量问题,维修、更换备件及人员费用全部免费;若因甲方操作人员违章操作造成的设备损坏,我们的服务仅收取成本费用。
2. 质量保证期外的服务
系统验收2年后的服务为质量保证期外的服务,我公司有责任为设备提供终身服务,此服务为成本费用的有偿服务:
保证在未来工作中以优惠价向业主提供全部设备和组件的备件供应、质量检验和维修服务。
设备若发生故障,北京机械工业自动化研究所承诺在接到故障报告后2小时内提供免费咨询服务、指导甲方维护人员接触故障。若不能解决,24小时内派遣技术人员到现场解决问题。我们的服务仅收取成本费用。
# 第五节 技术培训
现场提供免费技术培训:系统维护培训和操作培训。培训人员及内容如下:
| 系统管理技术人员的培训——若干名 | |
|---|---|
| 培训目标 | 负责系统管理机、监控机、通讯网络、数据库的运行保障、维护及维修工作 |
| 培训内容 | 控制原理及应用,数据库系统,仓库管理与控制软件 |
| 培训时间 | 7天 |
| 人员基本条件 | 计算机专业技术人员 |
| 管理机、监控机操作人员的培训——若干名 | |
| 培训目标 | 掌握管理机、监控机系统工作原理,达到能熟练操作,并执行日常出入库作业 |
| 培训内容 | 数据库系统,仓库管理与控制软件(上机操作) |
| 培训时间 | 7天 |
| 人员基本条件 | 对计算机技术有初步了解的仓库管理人员 |
| 机械维修人员的培训——若干名 | |
| 培训目标 | 负责设备的机械维修和日常保养工作 |
| 培训内容 | 堆垛机、输送机的工作原理、结构特点,操作方法和维修保养知识 |
| 培训时间 | 7天 |
| 人员基本条件 | 机械专业或有一定经验的机修工 |
| 电器维修人员的培训——若干名 | |
| 培训目标 | 负责设备的电气维修和日常保养工作 |
| 培训内容 | 堆垛机、输送机的电气设备工作原理、操作方法、故障诊断和处理方法,以及维修保养知识 |
| 培训时间 | 7天 |
| 人员基本条件 | 电控专业或有一定经验的电气维修工 |
上述人员应积极参加现场安装调试工作,在调试中实习。在试运行的30天中,由受训人员操作,我公司人员在现场继续提供技术咨询和实地操作培训。
# 第六节 提供的技术文件
向用户提供如下技术文件:
| 序号 | 文件名称 | 份数 | 提供时间 | 备注 |
|---|---|---|---|---|
| 1 | 技术协议(合同附件) | 6份 | 签合同时 | 双方各3份 |
| 2 | 工程进度计划表 | 1份 | 签合同时 | |
| 3 | 货架、堆垛机、输送机机械安装图纸 | 4套 | 工程验收时 | |
| 4 | 堆垛机/输送机电气原理图 | 4套 | 工程验收时 | |
| 5 | 堆垛机/输送机控制系统操作手册 | 4套 | 工程验收时 | |
| 6 | 堆垛机/输送机机械维修保养手册 | 4份 | 工程验收时 | |
| 7 | 零配件目录和易损件制造图纸 | 4份 | 工程验收时 | |
| 8 | 计算机管理监控系统操作手册 | 4份 | 工程验收时 | |
| 9 | 计算机管理监控系统维护手册 | 4份 | 工程验收时 | |
| 10 | 微机随机技术资料 | 4份 | 工程验收时 | |
| 11 | 电气元器件的合格证和说明书 | 4份 | 工程验收时 | |
| 12 | 测试大纲、验收大纲及验收报告 | 4份 | 工程验收时 | 双方各2份 |
# 第七节 备品备件及专用工具
正式签订合同时,买方可根据卖方的建议从中选取合同价格等价的备品备件;
备品备件供应期限:不少于30年。(包括自制件、外购件);
# 第八节 系统维护和保养
# 8.1 堆垛机部分
# 8.1.1维修保养计划
| 序号 | 结构名称 | 部件名称 | 功能检查 | 磨损检查 | 密接检查 | 间隙检查 | 清 洁 | 重新调节 | 目 检 | 润 滑 | 润滑剂 | 润滑周期 | 维修周期 | 备注 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 下横梁 | 电机减速器 | √ | √ | 见电机减速器说明书 | |||||||||
| 主动轮 | √ | √ | 钙基润滑脂 | 六个月 | 三个月 | |||||||||
| 被动轮 | √ | 钙基润滑脂 | 六个月 | 三个月 | ||||||||||
| 导向轮 | √ | √ | √ | √ | 钙基润滑脂 | 一周 | 二周 | |||||||
| 安全钩 | √ | 六个月 | ||||||||||||
| 缓冲器 | √ | 六个月 | ||||||||||||
| 2 | 立柱 | 导轨 | √ | √ | √ | 六个月 | ||||||||
| 连接螺栓 | √ | 六个月 | ||||||||||||
| 电机减速器 | 见电机减速器说明书 | |||||||||||||
| 卷筒 | √ | 三个月 | ||||||||||||
| 钢丝绳 | √ | √ | 三个月 | |||||||||||
| 钢丝绳压板 | √ | 三个月 | ||||||||||||
| 3 | 上横梁 | 导轮 | √ | √ | 三个月 | |||||||||
| 滑轮 | √ | |||||||||||||
| 4 | 载货台 | 起升导轮 | √ | √ | √ | 钙基润滑脂 | 六个月 | 三个月 | ||||||
| 滑轮 | √ | 六个月 | ||||||||||||
| 5 | 货叉 | 链条、链轮 | √ | √ | 70#机械油 | 一周 | 一个月 | |||||||
| 链条张紧器 | √ | √ | √ | 三个月 | ||||||||||
| 磨擦离合器 | √ | √ | √ | 三个月 | ||||||||||
| 中叉轴承 | √ | √ | 钙基润滑脂 | 三个月 | 三个月 | |||||||||
| 电机减速器 | 见电机减速器说明书 | |||||||||||||
| 6 | 超速防坠装置 | 限速器 | √ | √ | √ | 三个月 | ||||||||
| 钢丝绳 | √ | √ | 三个月 | |||||||||||
| 杠杆机构 | √ | √ | 三个月 | |||||||||||
| 7 | 过载松绳装置 | 绳卡 | √ | √ | 三个月 | |||||||||
| 8 | 轨道 | 天轨 | √ | √ | √ | 六个月 | ||||||||
| 地轨 | √ | √ | √ | √ | 三个月 | |||||||||
| 9 | 滑触线 | 接头 | √ | 三个月 | ||||||||||
| 正交器 | √ | 六个月 | ||||||||||||
| 集电器 | √ | √ | 三个月 |
# 8.1.2维修保养详细清单
| 序号 | 检查项目 | 技术要求 | 检查方法 | 符合(√) 不符合(×) | 整改措施 | 责任人 | 期限 | 效果验证 | 备注 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 行走主动轮 | ⑴车轮踏面磨损:≤5mm | 直尺 | □ | |||||
| ⑵与下横梁连接紧固件无松动 | 目测 扳手 | □ | |||||||
| ⑶机构运行无异常噪音 | 耳听 | □ | |||||||
| ⑷与驱动系统连接紧固可靠 | 扳手 | □ | |||||||
| 2 | 行走从动轮 | ⑴车轮踏面磨损:≤5mm | 直尺 | □ | |||||
| ⑵与下横梁连接紧固件无松动 | 目测 扳手 | □ | |||||||
| ⑶机构运行无异常噪音 | 耳听 | □ | |||||||
| 3 | 行走导向轮 | ⑴导向轮踏面磨损:≤3mm | 直尺 | □ | |||||
| ⑵紧固件无松动,卡簧无脱槽 | 目测 扳手 | □ | |||||||
| ⑶轴承无损坏,无缺油 | 目测 | □ | |||||||
| ⑷机构运行无异常噪音 | 耳听 | □ | |||||||
| 4 | 行走驱动系统 | ⑴机构连接紧固无松动 | 目测 扳手 | □ | |||||
| ⑵机构运行无异常噪音 | 耳听 | □ | |||||||
| ⑶电机减速机表面温度≤65℃ | 温度计及手摸感觉 | □ | |||||||
| ⑷减速机无漏油,内部油量充足 | 目测 | □ | |||||||
| 5 | 行走水平导向轮 | ⑴与地轨间隙≤3mm | 直尺 | □ | |||||
| 6 | 行走导向轮架 | ⑴结构无变形 | 目测 | □ | |||||
| ⑵焊缝无开裂 | 目测 | □ | |||||||
| ⑶紧固无松动 | 目测 扳手 | □ | |||||||
| 7 | 下横梁 | ⑴各连接焊缝无开裂 | 目测 | □ | |||||
| (2)下横梁与方法兰焊缝要求: 无开裂、无变形、焊缝高10mm夹角45°、无任何烧伤夹渣焊瘤及横纵向裂纹、表面平整高低差≤0.5mm(立焊缝≤1.5mm)、不得出现严重咬边(咬边长度不超过焊缝长度的10%,咬边深度不超过0.4 mm)和未焊透现象 | 直尺 目测 | □ | |||||||
| 8 | 立柱焊缝 | ⑴立柱与下法兰板焊缝无开裂、无变形、焊缝高10mm夹角45°、无任何烧伤夹渣焊瘤及横纵向裂纹、表面平整高低差≤0.5mm(立焊缝≤1.5mm)、不得出现严重咬边(咬边长度不超过焊缝长度的10%,咬边深度不超过0.4 mm)和未焊透现象 | 直尺 目测 | □ | |||||
| ⑵立柱与中法兰板焊缝(要求同上) | 目测 直尺 | □ | |||||||
| ⑶立柱与上法兰板焊缝(要求同上) | 目测 直尺 | □ | |||||||
| 9 | 立柱残余变形 | ⑴下立柱应无明显永久变形,立柱上升降导轨的直线度≤2mm | 吊铅垂线 | □ | |||||
| ⑵上立柱应无明显永久变形,立柱上升降导轨的直线度≤2mm | 吊铅垂线 | □ | |||||||
| 10 | 行走机械缓冲器 | ⑴下横梁和上横梁两端缓冲器均应紧固可靠无松动 | 目测 扳手 | □ | |||||
| ⑵缓冲器缓冲体无明显永久变形和裂纹等缺陷 | 目测 | □ | |||||||
| 11 | 立柱上下法兰连接 | ⑴上法兰与上横梁、下法兰与下横梁结合面连接紧密无缝隙 | 直尺 目测 | □ | |||||
| ⑵所有紧固螺栓无缺失无松动 | 目测 扳手 | □ | |||||||
| ⑶所有紧固连接件无碰伤等损坏现象 | 目测 | □ | |||||||
| 12 | 立柱中法兰连接 | 打开检修孔检查: ⑴所有紧固螺栓无缺失无松动 | 目测 扳手 | □ | |||||
| ⑵所有紧固连接件无碰伤等损坏现象 | 目测 | □ | |||||||
| ⑶两法兰结合面连接紧密无缝隙 | 直尺 目测 | □ | |||||||
| 13 | 上横梁 | ⑴各结构连接焊缝无开裂和其它损伤 | 直尺 目测探 | □ | |||||
| ⑵与立柱方法兰板焊缝无开裂、无变形、焊缝高10mm夹角45°、无任何烧伤夹渣焊瘤及横纵向裂纹、表面平整高低差≤0.5mm(立焊缝≤1.5mm)、不得出现严重咬边(咬边长度不超过焊缝长度的10%,咬边深度不超过0.4 mm)和未焊透现象 | 直尺 目测 | □ | |||||||
| 14 | 升降驱动系统 | ⑴机构连接紧固无松动 | 目测 扳手 | □ | |||||
| ⑵机构运行无异常噪音 | 耳听 | □ | |||||||
| ⑶电机减速机表面温度≤65℃ | 温度计及手摸感觉 | □ | |||||||
| ⑷减速机无漏油,内部油量充足 | 目测 | □ | |||||||
| 15 | 上水平导向轮 | ⑴导向轮踏面磨损:≤3mm | 直尺 | □ | |||||
| ⑵紧固件无松动,卡簧无脱槽 | 目测 | □ | |||||||
| ⑶轴承无损坏,无缺油 | 目测 | □ | |||||||
| ⑷机构运行无异常噪音 | 耳听 | □ | |||||||
| 16 | 上水平导轮与天轨侧面间隙 | ≤3mm | 钢板尺 | □ | |||||
| 17 | 上水平导轮架 | ⑴结构无变形 | 目测 | □ | |||||
| ⑵焊缝无开裂 | 目测 | □ | |||||||
| ⑶紧固无松动 | 扳手 | □ | |||||||
| 18 | 升降牵引钢丝绳 | 以下如不满足必须更换钢绳: ⑴钢绳表面无明显磨损和腐蚀 | 目测 | □ | |||||
| ⑵在一个捻距内断丝数≤钢丝总数的2% | 目测 | □ | |||||||
| ⑶外层钢丝磨损≤钢丝直径的40% | 目测 | □ | |||||||
| ⑷钢绳无明显扭结、压扁或散股 | 目测 | □ | |||||||
| 19 | 升降牵引链条 | ⑴销轴、滚子、链板无明显磨损 | 目测 | □ | |||||
| ⑵链条无明显变形伸长 | 目测 | □ | |||||||
| ⑶所有链板、链接头无松脱丢失变形 | 目测 | □ | |||||||
| 20 | 升降牵引链轮 | 以下如不满足必须更换链轮 ⑴链齿齿厚、齿宽减少不大于10% | 目测 | □ | |||||
| ⑵链齿、轮缘或轮毂无裂纹和变形等缺陷 | 目测 | □ | |||||||
| 21 | 升降卷筒 | 以下如不满足必须更换卷筒: ⑴卷筒壁厚磨损减小不大于10% | 目测 | □ | |||||
| ⑵卷筒表面无裂纹、变形等缺陷 | 目测 | □ | |||||||
| 22 | 升降滑轮 | ⑴轮槽壁厚磨损减小不大于10% | 目测 | □ | |||||
| ⑵轮缘或轮毂无裂纹、变形等缺陷 | 目测 | □ | |||||||
| ⑶运行中轴承温度≤65℃无异常噪音 | 手摸 耳听 | □ | |||||||
| 23 | 曳引轮 | ⑴槽深(槽内钢绳顶点至曳引轮外园尺寸)应一致,差距≤1.5mm | 直尺 | □ | |||||
| ⑵轮缘或轮毂无裂纹等缺陷 | 目测 | □ | |||||||
| ⑶轮槽磨损槽底至钢绳间隙>1mm | 直尺 | □ | |||||||
| ⑷轮槽在切口下面的轮缘厚度应≥钢绳直径 | 目测 | □ | |||||||
| 24 | 升降和配重导轨 | ⑴无明显磨损,不均匀磨损深度≤2mm | 直尺 目测 | □ | |||||
| ⑵接头错位高低差≤0.3mm | 目测 扳手 | □ | |||||||
| ⑶接头间隙≤0.5mm | 目测 | □ | |||||||
| ⑷与立柱连接紧固件无松动 | 目测 | □ | |||||||
| ⑸与立柱焊接焊缝牢固无开裂 | 目测 | □ | |||||||
| 25 | 升降牵引链条端部连接 | ⑴打开载货台吊架盖板检查链条接头,销轴卡片固定牢固无松脱,调整螺母紧固牢靠 | 目测 | □ | |||||
| ⑵检查配重铁上部链接头销轴卡片固定牢固无松脱 | 目测 | □ | |||||||
| ⑶链条接座与配重铁焊接牢固无开裂无变形 | 目测 | □ | |||||||
| 26 | 升降牵引钢绳端部连接 | ⑴检查配重端钢绳连接,绳夹无松脱缺件且紧固牢靠,间距为6~7倍钢绳直径,第一绳夹尽量靠近套环且不可紧固中损坏外层钢丝 | 目测 扳手 | □ | |||||
| ⑵检查上横梁或载货台端钢绳连接(要求同上) | 目测 | □ | |||||||
| ⑶检查卷筒端钢绳连接,压板螺栓紧固可靠,螺杆无拉弯变形,钢绳缠绕紧密,在各压板间无抽动和松弛现象 | 目测 | □ | |||||||
| ⑷卷筒上固定钢绳安全圈≥2.5圈 | 目测 | □ | |||||||
| 27 | 配重铁 | ⑴导轮架无变形焊缝无开裂 | 目测 | □ | |||||
| ⑵配重导轮、轮轴紧固件无松动,卡簧无脱槽 | 目测 | □ | |||||||
| ⑶导轮轴承无损坏,无缺油,无异常噪音,导轮无明显磨损 | 目测 | □ | |||||||
| ⑷配重铁整体组装无扭曲,组合螺栓无松动无损坏 | 目测 扳手 | □ | |||||||
| 28 | 载货台 | ⑴整体无永久变形 | 目测 | □ | |||||
| ⑵所有连接焊缝无开焊断裂迹象 (参照以上焊缝要求) | 目测 | □ | |||||||
| 29 | 货叉 | ⑴所有叉体无永久变形、裂纹等损坏迹象 | 目测 | □ | |||||
| ⑵所有导向轴承(滚轮)无损坏,运行无异常噪音 | 目测 耳听 | □ | |||||||
| ⑶所有链条松紧适度,运行无卡阻现象,链条接头连接紧固可靠 | 直尺 | □ | |||||||
| ⑷所有机械挡块无松动丢失损坏,安装位置正确功能可靠 | 目测 | □ | |||||||
| ⑸叉中位时上中下叉端部对齐,错位≤±3 | 直尺 | □ | |||||||
| ⑹两叉中心安装平行度≤2mm | 水平仪 | □ | |||||||
| 30 | 货叉驱动系统 | ⑴机构连接紧固无松动 | 目测 扳手 | □ | |||||
| ⑵机构运行无异常噪音 | 目测 耳听 | □ | |||||||
| ⑶电机减速机表面温度≤65℃ | 手摸或温度计 | □ | |||||||
| ⑷减速机无漏油,内部油量充足 | 目测 扳手 | □ | |||||||
| 31 | 机械车挡 | ⑴地轨车挡与地基连接可靠,焊缝无开裂,紧固件无松动 | 目测 扳手 | □ | |||||
| ⑵天轨车挡与货架连接可靠,焊缝无开裂,紧固件无松动 | 目测 扳手 | □ | |||||||
| 32 | 夹轨器 | ⑴夹轨器与下横梁紧固可靠无松动 | 目测 扳手 | □ | |||||
| ⑵夹轨器与地轨下面(防翻面)距离3~5mm | 目测 直尺 | □ | |||||||
| ⑶夹轨器与地轨侧面(垂直面)距离5~7mm | 目测 直尺 | □ | |||||||
| 33 | 扫轨板 | 下横梁扫轨板和加强筋板与地轨上面间隙≥6mm | 目测 直尺 | □ | |||||
| 34 | 载货台下部机械缓冲器 | ⑴不得缺失 | 目测 | □ | |||||
| ⑵固定牢靠 | 目测 | □ | |||||||
| ⑶缓冲体无裂纹或其它损坏 | 目测 | □ | |||||||
| 35 | 金属结构总装垂直度 | 立柱上升降导轨在全长范围内对地轨上面垂直度≤3mm | 吊重锤 | □ | |||||
| 36 | 其他方面 |
# 8.2 输送系统部分
立体库输送机包括链式输送机等相关设备。
上述这些设备安装调试后,投入试生产之前,应先进行保养一次:
首先清理输送机上面的灰尘,特别是链条机的链条,用刷子或高压气体清理。
调整链条机链条张紧是否松紧合适。并检查链条是否全部在正确的位置。
上述工作全部完成后,交与甲方使用,同时应对于甲方维护保养人员进行培训,使其能正确的使用和保养设备。
输送机设备交与甲方使用3个月以后,设备生产厂家及甲方维护保养人员一起对于输送机设备进行一次全面的保养。因为新的设备在使用一段时间后特别是链条机的链条伸长需要调整及新的设备磨合基本合适了,需要进行调整。因此应进行下列工作:
清理链条机表面尘土。
检查链条机等设备的链条松紧度是否合理。如有链条伸长现象即使调整。
检查链条机等设备的驱动链条的松紧度是否合适。如有问题及时调整。
检查各个链轮固定是否牢靠,如有松动或移动的应进行调整。
对于上述的设备链条及轴承轮等转动的部分进行夹注润滑油。
检查链条机张紧部分转动是否灵活,轴承是否有损坏现象。如有应及时更换。
检查各个输送机高度是否在工艺要求的高度范围内,如有变化应及时调整。
以上工作一般是4-6个人参加的情况下,大约需要2天时间完成工作。
设备经过保养后,维护人员应做记录。主要是对哪些部位经常损坏或松动,哪些零部件经常出现问题,在此基础上 甲方应购置一些相关备件,以便随时更换。
上述工作完成6个月以后,需要对链条机等设备进行第二次保养,工作量基本上3个月后保养工作一样。大约4-6个人,2天时间完成工作。
设备使用一年后进行一次全面的保养。除了3个月保养的工作以外,还应进行下列工作。
用水平仪或水平尺检查各个输送机的安装位置和高度是否符合图纸的技术要求。如有变化应即使调整,以保证输送设备正常运行。
由于使用一年时间,应检查各个检测开关支架固定是否可靠,如有松动现象及时处理。
检查与链条输送机等设备相对的辅助设施连接是否可靠。
以上工作4-6人需要大约4-6天时间完成。同时根据平时检修和记录应适当准备部分备品备件,以保证设备的正常运行。
# 第九节 验收方案
自动化立体仓库工程竣工后由甲乙双方共同验收,按照国家标准检测有关数据。当检测数据符合标准要求时,供货方出具合格证书,并集中提供培训服务。
自动化立体仓库验收依照ISO9001:2000版标准建立的质量管理体系标准,按照有关的标准执行,分制造过程验收、安装调试验收和最终系统验收三部分。
设备必须是全新的,未使用过的,完好无损。
技术资料完整齐备。
有制造厂家检验合格证。
设备安装调试后经试运行(在规定试运行时间内)各项技术性能、指标参数达到上述各项技术性能要求和符合国家相关标准要求。
# 9.1制造过程验收
制造过程验收在制造方进行,采取工序检验过程控制等手段。部件装配合格后发运安装现场。
# 9.2安装验收
1、安装基础时,由施工方提供数据,采用水平仪复查。此过程用控制图分析记录数据,确定基准。
2、导轨部分验收
检测时依据国家标准,采用水平仪、经纬仪验证地轨、天轨检测安装偏差。
3、堆垛机安装验收
堆垛机进行运行试验时,采用秒表计数检测各项运行速度。
4、输送机安装验收
输送机进行运行试验时,目测运行是否平稳流畅。
5、运行管理监控及控制程序验收
该过程在货架安装调试完毕、堆垛机/输送机单机运行正常后,采用现场实际操作运行与验证同步进行的方式。
# 9.3最终系统验收
设备安装调试后经试运行(在规定试运行时间内)各项技术性能、指标达到各项技术性能要求和符合国家相关标准要求。经双方成立验收小组,确定验收大纲,对系统进行最终验收。
附录1 货架有限元报告
附录2 系统方案图纸